Advanced robot offline programming (OLP) workflow for welding: templates and automatic path optimization
Learn how advanced robot offline programming for welding helps manufacturers program robots faster, more consistently and at scale. This guide explains structured OLP workflows, reusable weld templates, welding databases and automatic path solving, showing how to efficiently handle complex assemblies, high product variation and high-mix low-volume production without coding.

In our previous guide on fast and easy robot offline programming (OLP) for welding, we introduced a practical no-code workflow for creating and validating robot weld paths. That approach is ideal for getting started and proving value quickly. But as production complexity grows, basic workflows are often no longer enough.
Advanced robot offline programming focuses on scalability, reuse and automation. Rather than programming welds one by one, teams build structured systems that handle complex assemblies, repeated weld patterns and high product variation efficiently. This article explores what an advanced OLP workflow looks like in practice and how it supports modern robotic welding environments.
Advanced robot offline programming workflow: overview
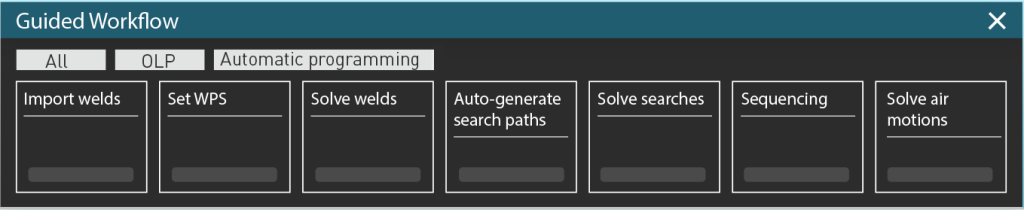
An advanced robot offline programming workflow for welding organizes the process into repeatable, scalable steps. While each company may adapt the workflow to their specific needs, a typical process includes:
- Model preparation and import – Start with CAD models of the part or assembly. Ensure weld seams, joints and fixturing are clearly defined and aligned with the robot cell layout. Proper preparation ensures accurate simulation and prevents errors downstream.
- Weld feature recognition and template assignment – Identify weld features automatically or manually then assign predefined templates specifying torch orientation, motion patterns and process settings. Templates capture proven strategies, improving consistency and enabling reuse across multiple parts.
- Program generation using welding database – Apply standardized parameters stored in a welding database across all welds. This includes process settings, speeds and Welding Procedure Specifications (WPS), reducing manual setup and variation between programmers.
- Automatic path solving and collision checking – Use automatic solvers to detect collisions, joint limit violations and optimize robot motion. This step ensures collision-free, efficient paths without time-consuming trial-and-error adjustments.
- Simulation and validation – Simulate the entire welding sequence in a virtual environment, checking for accessibility, cycle times and potential issues before running the program on real robots.
- Program export to robot controller – Once validated, export the optimized program to the robot controller, ensuring that simulated parameters match real-world production settings.
This structured workflow maximizes reuse, reduces manual work and maintains consistent, high-quality welding programs.
Why advanced OLP workflow scales for welding
Unlike basic offline programming, which focuses on creating individual robot paths, advanced OLP is designed to scale across complex parts and high-mix production environments. The emphasis shifts from one-off programming tasks to building a repeatable framework that supports long-term efficiency.
Scalability comes from organizing welding knowledge into reusable assets and automating time-consuming optimization tasks. Templates, welding databases and automatic path solvers work together to reduce manual rework, improve consistency and maintain predictable throughput even as part complexity or product variation grows.
For manufacturers producing large welded structures or frequently adjusting designs, a scalable OLP workflow ensures faster robot programming, fewer errors and better utilization of engineering resources.
How weld templates standardize robot offline programming
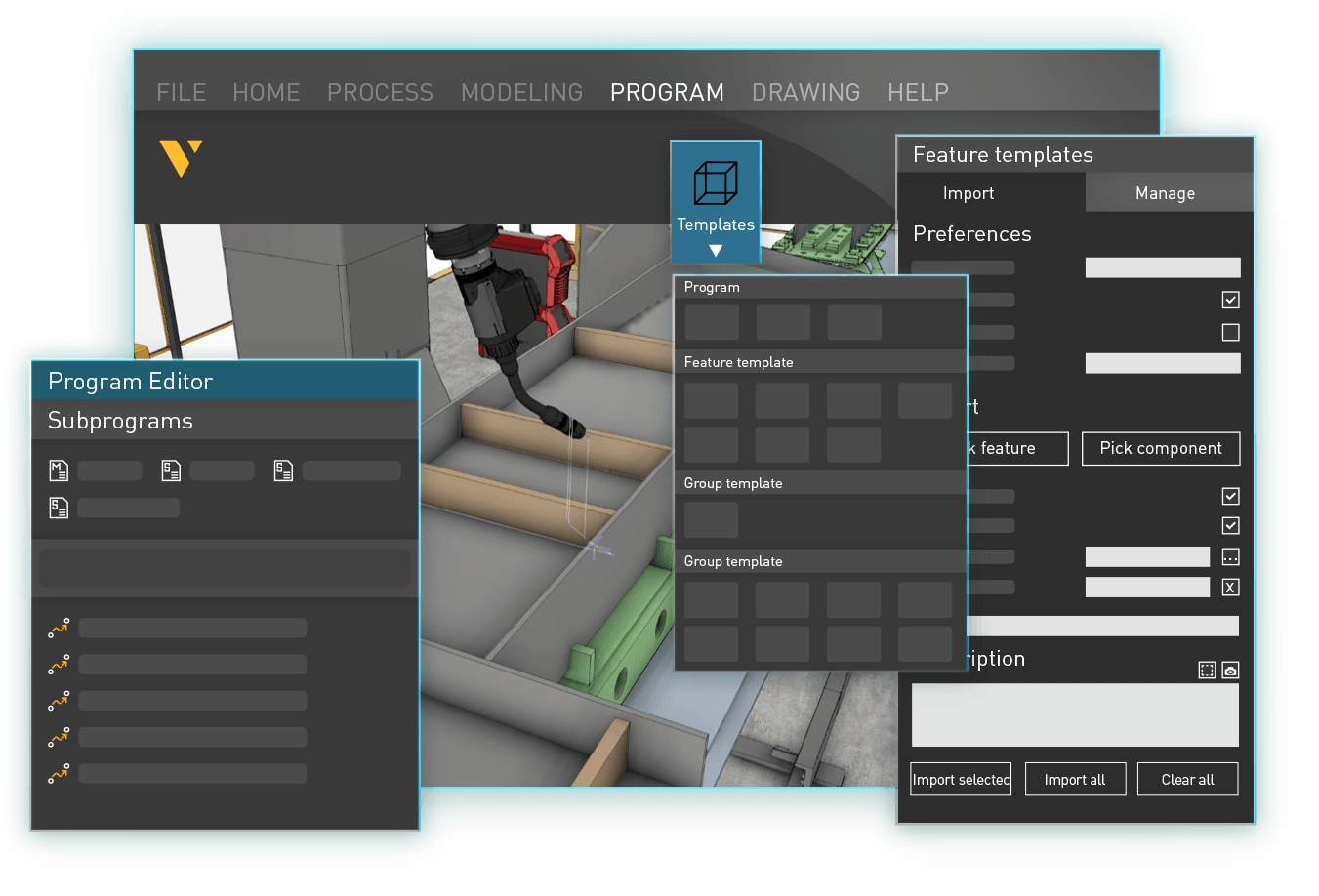
Weld templates are central to advanced robotic welding workflows. They capture proven programming strategies and make them reusable. A template defines how a weld behaves, including torch orientation, motion patterns, approach and exit behavior and process settings.
Instead of recreating weld paths for every new part, engineers can apply templates to similar geometries, generating reliable weld programs much faster. Templates improve both programming speed and process stability, reducing variation between programmers and across shifts. In high-mix production environments, this approach enables teams to adapt quickly to new part variants while maintaining consistent quality.
How a welding database improves consistency
A welding database extends the concept of templates by organizing reusable knowledge into a structured system. It stores welding parameters, motion settings and WPS data that can be applied across multiple project.
By centralizing this information, advanced OLP reduces reliance on individual experience, makes processes more repeatable and ensures that simulation aligns with real-world production. New programmers can follow established standards while experienced engineers can refine and expand the database. Over time, the welding database becomes a shared knowledge base that supports collaboration, training and systematic process optimization.
How automatic path solvers reduce collisions
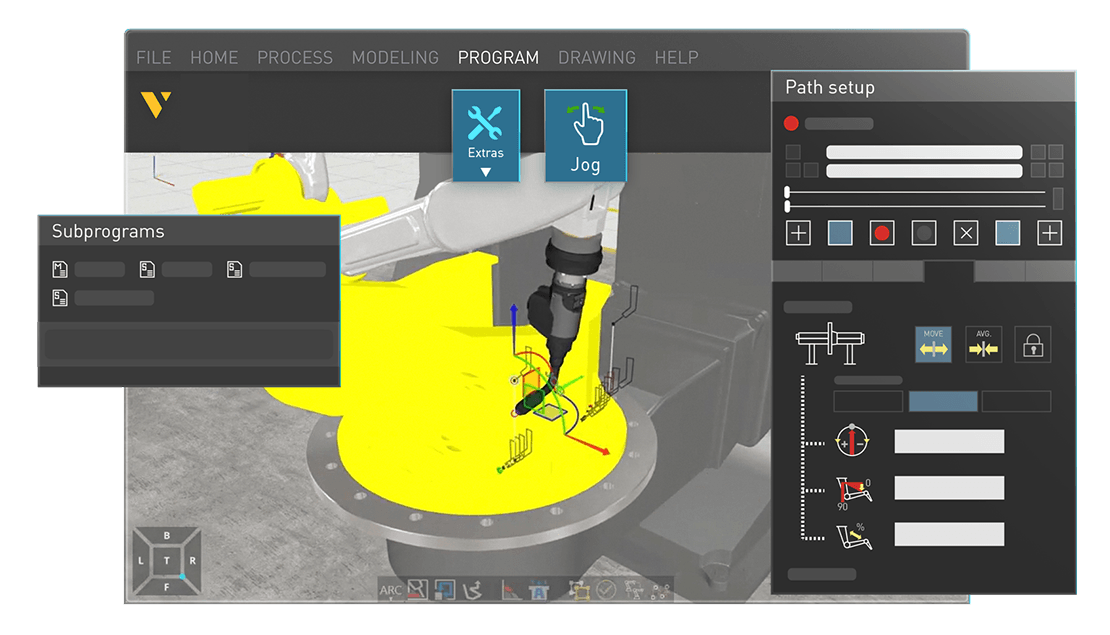
Automatic path solvers address one of the most time-consuming aspects of welding simulation: collision avoidance and motion optimization. The solver analyzes robot movements to detect potential collisions, joint limit violations and inefficient transitions between welds, then generates safer, more efficient paths automatically
This reduces the need for manual point-by-point adjustments, shortens debugging cycles and increases confidence in the simulated program. Automatic solvers are especially valuable in large or densely packed welding cells where manual optimization can be error-prone. They help maintain reliable robot motion while preserving cycle time and overall process stability.
Supporting high-mix low-volume production
Advanced robot offline programming is particularly effective in high-mix, low-volume welding environments where flexibility is critical. By reusing templates and database-driven knowledge, programmers can adapt quickly to new part variants without starting from scratch.
Structured workflows combined with automatic optimization allow manufacturers to handle variation without sacrificing efficiency. Instead of treating each new job as a separate programming challenge, teams build on an existing framework that supports rapid adaptation. This capability becomes a key competitive advantage as demand for customization and shorter lead times increases.
How advanced OLP reduces welding programming time by 5x
In practical terms, the difference between basic and advanced robot offline programming becomes clear when looking at programming time and workflow efficiency. In a basic OLP workflow, programmers must first inspect the workpiece and drawings, manually create weld paths, run path checks and then adjust paths before selecting welding parameters. This process not only takes time but also delays a critical insight: whether the weld path is actually feasible.
With an advanced robot offline programming workflow, this process is significantly streamlined. Weld paths can be imported directly, welding parameters are automatically applied through predefined WPS and the path solver immediately adjusts and validates the paths. This means programmers can identify whether a weld is feasible much earlier in the process, without going through multiple manual steps.
In a typical comparison, a basic OLP workflow for weld path creation can take around 36 minutes, while the same task using advanced OLP takes approximately 7 minutes—a 5x reduction in programming time. The biggest time saving comes from eliminating trial-and-error path creation and enabling instant feedback on weldability, allowing teams to move forward with confidence.
When to move from basic to advanced OLP workflow
Manufacturers typically reach a transition point when basic offline programming methods no longer keep pace with production demands. Signs include repeated manual edits, frequent collision troubleshooting and growing difficulty managing similar weld programs across projects.
Transitioning to advanced OLP does not require abandoning visual or no-code workflows. Instead, it involves organizing existing practices into a structured system that supports scalability. Teams working with complex assemblies or high product variation in different industrial processes can achieve faster programming, more predictable outcomes and better use of engineering resources.
Advanced robot offline programming for welding: FAQ
An advanced robot offline programming workflow focuses on scaling programming across complex or high-mix production. It combines reusable weld templates, automatic path solving, collision optimization and welding databases to create structured, repeatable programming systems.
Basic OLP concentrates on creating individual robot paths. Advanced OLP introduces reuse and automation through templates and databases, reducing manual corrections and improving consistency across projects.
Weld templates store proven welding strategies that can be applied to similar geometries. This accelerates programming and ensures consistent process quality.
A welding database organizes reusable welding knowledge such as templates and WPS parameters. It helps standardize programming and maintain repeatable results.
Automatic solvers generate collision-free and optimized motion without extensive manual editing, shortening debugging time and improving simulation reliability.
No. Advanced OLP builds on visual, no-code workflows and focuses on structured reuse rather than manual robot coding.

Further reading
Automated robot programming: automated path creation in minutes
Automated robot programming reduces hours of manual work by shifting path creation and validation to the offline programming software (OLP). This article explains how automated programming works in practice, the...
Complete guide to ABB robot programming and offline programming
Master ABB robot programming with offline programming (OLP). This comprehensive guide explains how to efficiently program MultiMove synchronized welding cells, streamline the OLP workflow and choose the right software, ABB...

Optimizing manufacturing with simulation and robot offline programming
Manufacturers are increasingly relying on simulation and robot offline programming to master variant diversity, improve quality and keep cycle times predictable. This article explores how simulation, digital twins and offline...