Check Out What’s New in Visual Components 4.3.1
Find out what’s new in Visual Components 4.3.1. We’added some new features and made improvements to usability and stability of our products in this release.
We’ve added some new features and made improvements to our products in this release. Here’s an overview of the updates!
New Features
Improved Collision detection
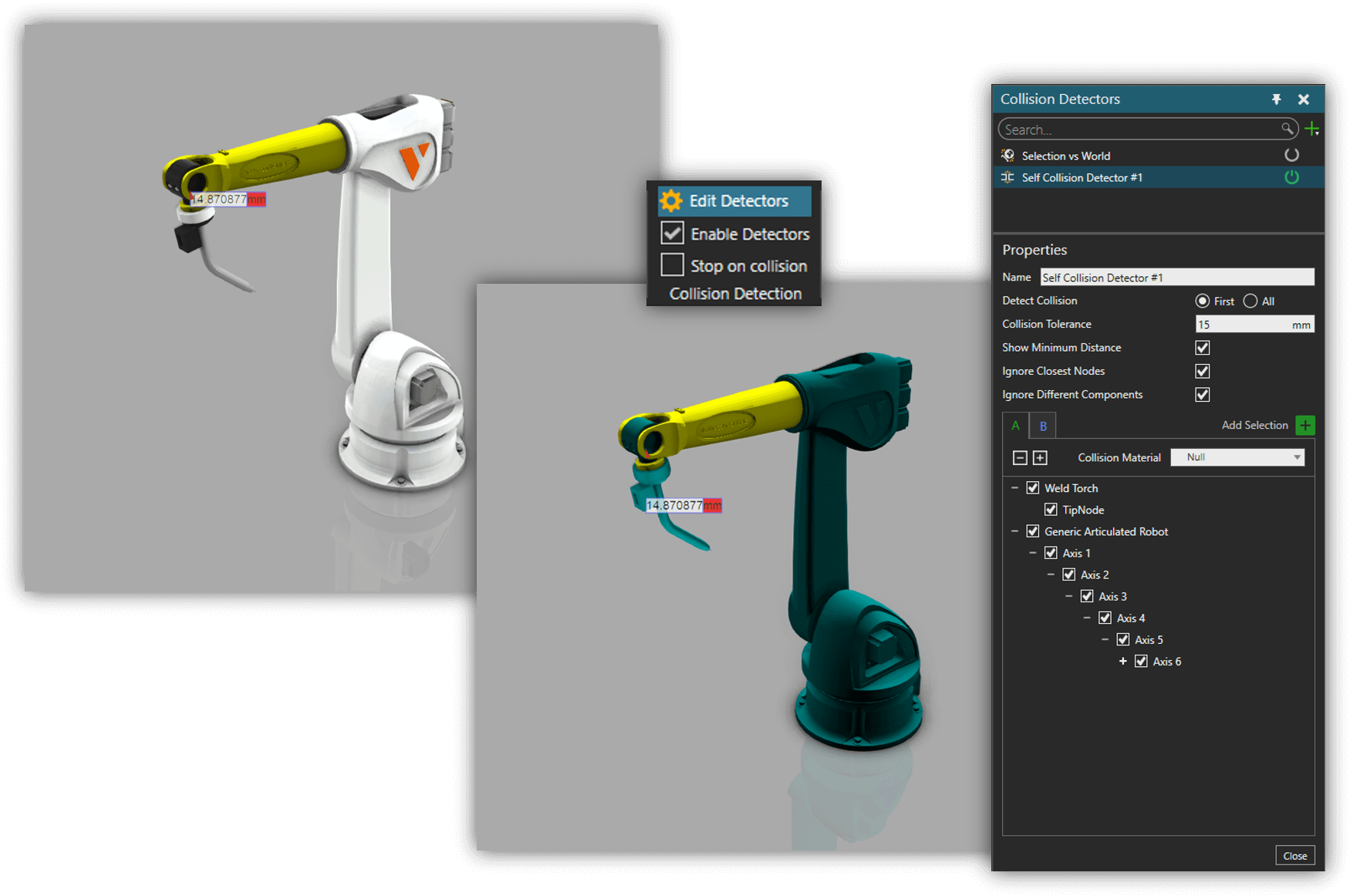
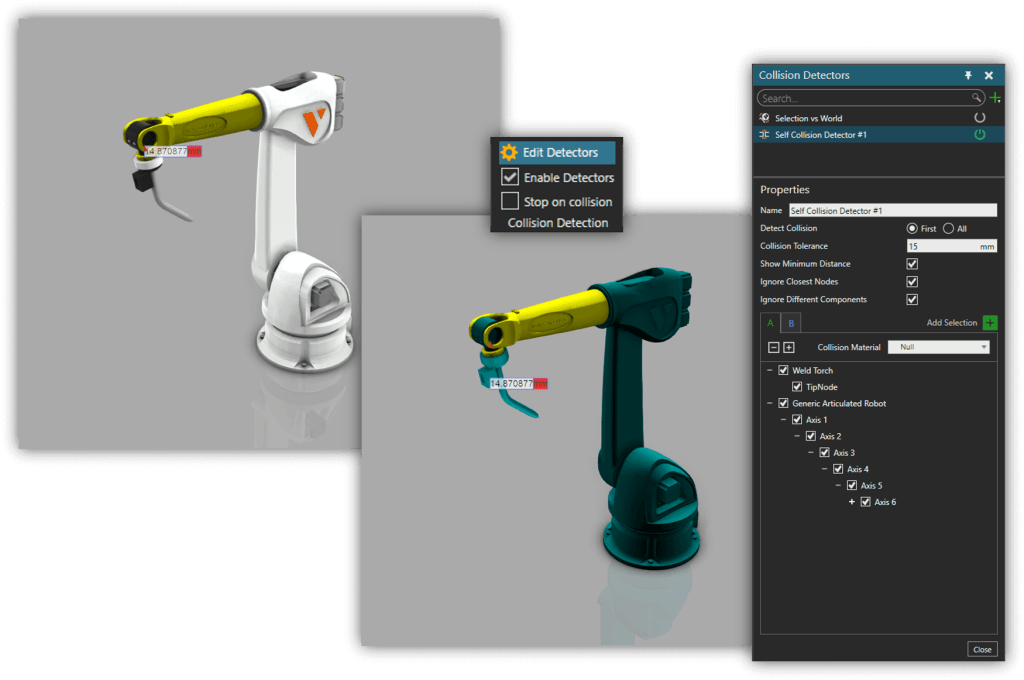
The Collision detector user interface has been improved. Visual Components users can now set properties for each created collision detector on a new collision detector panel. In addition, with just a few clicks, users can create a self-collision detector checking for a selected robot.
External Python editor
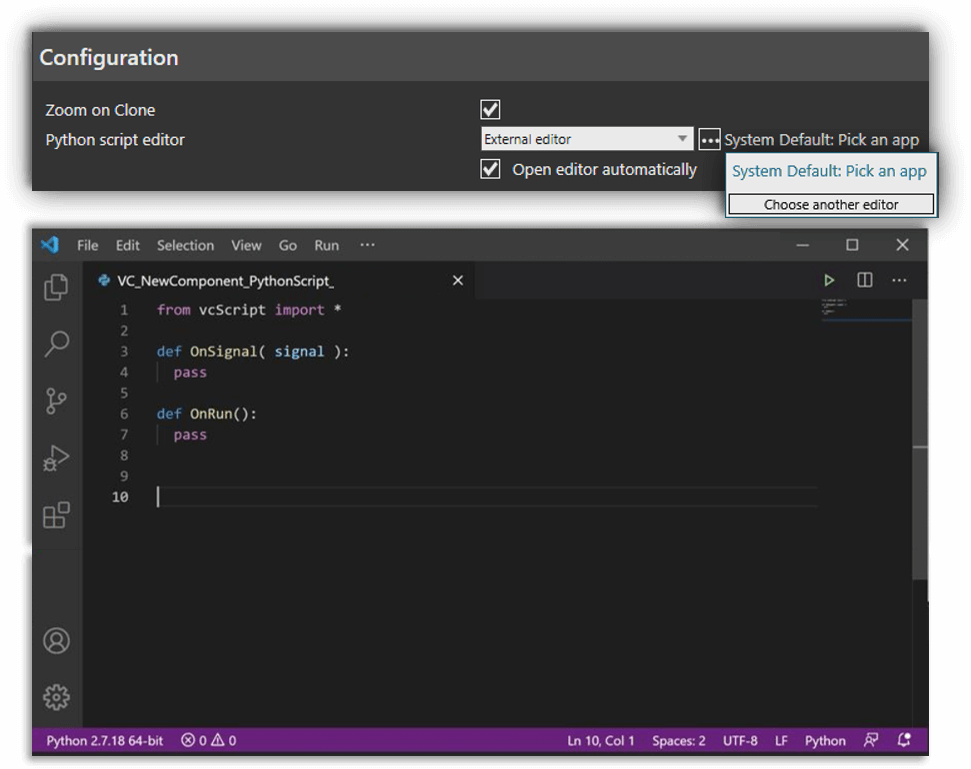
The default internal Python editor can now be changed to any external editor of user’s choice. Use any code editor you want to write scripts and sync updates.
CAD Importers
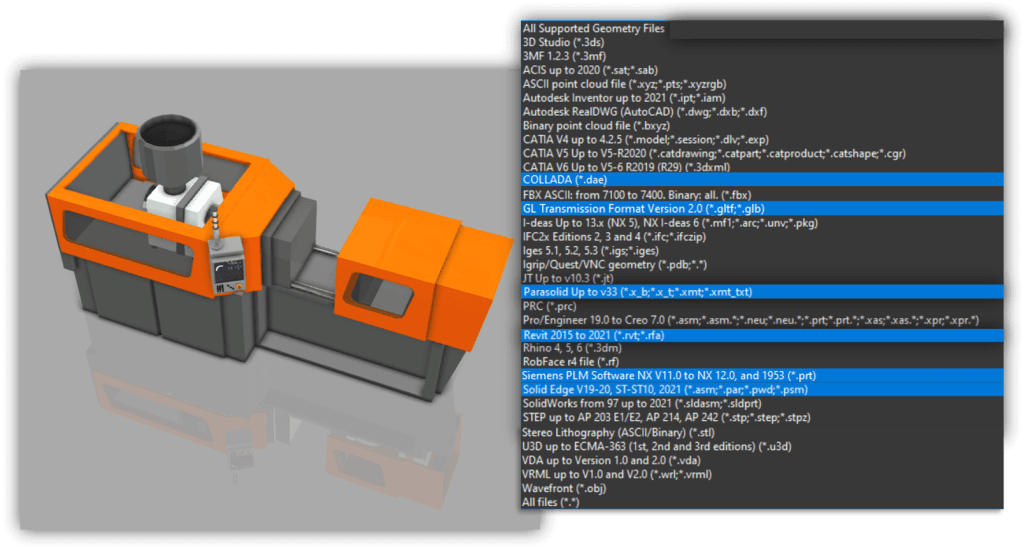
CAD importers have been updated to support the latest versions of Siemens NX, Solid Edge, Parasolid, and Revit. Additionally, the support for some new formats is added. See the highlighted in the following image for details.
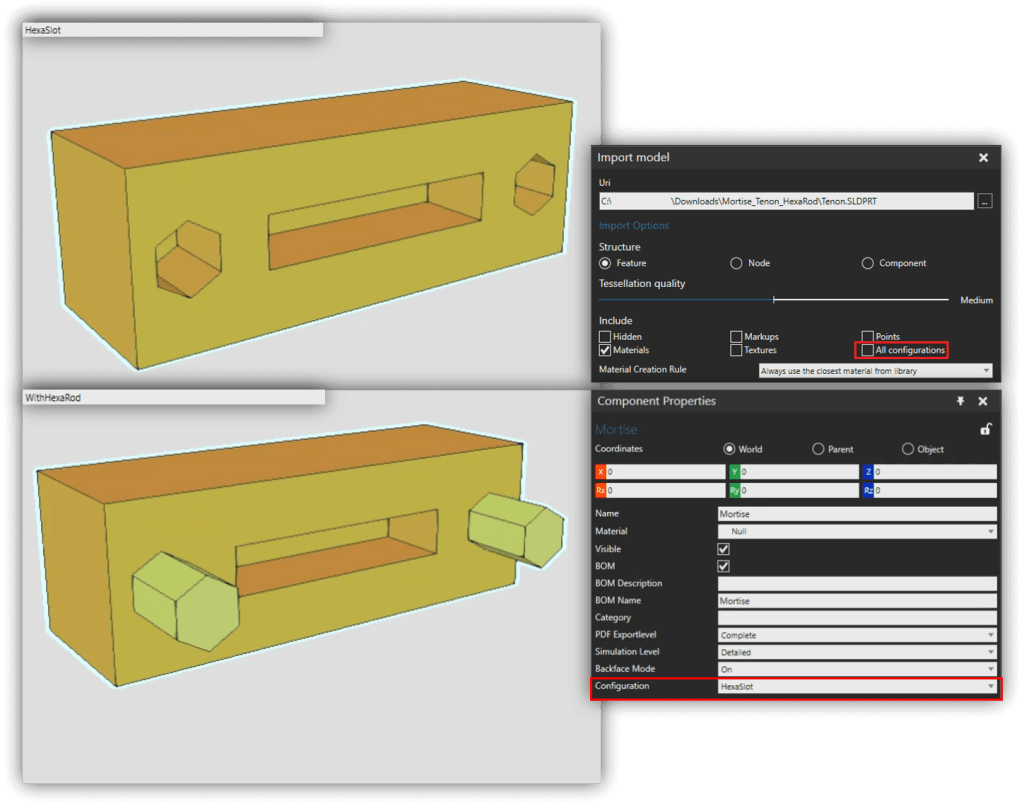
Import CAD Configurations
It is now possible to import all CAD configurations while importing the CAD data from one document. The component properties panel includes a drop-down menu for configurations that shows all model variations as originally created in the CAD software. This enables quick modeling on the Visual Components side to get the CAD data ready for simulation with a simple workflow. Currently, this feature is supported for models from Catia v4, IDEAS, and Solidworks.
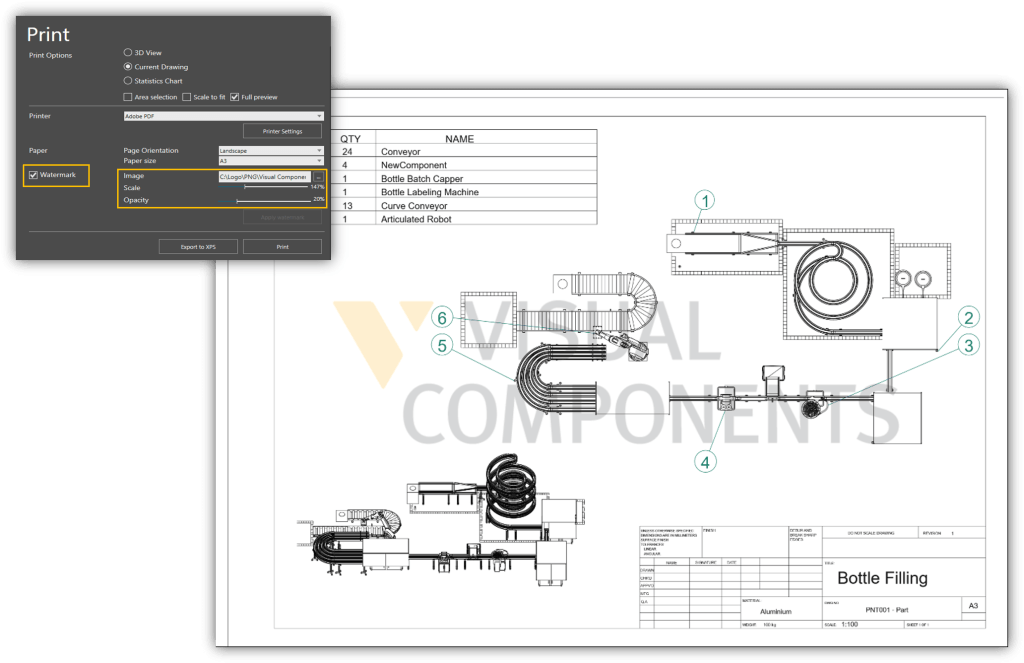
Add watermark to 2D Drawings
Add watermarks to 2D drawings for customized branding. Watermarks help to identify the owner of the designs and protects the content from theft or unauthorized use.
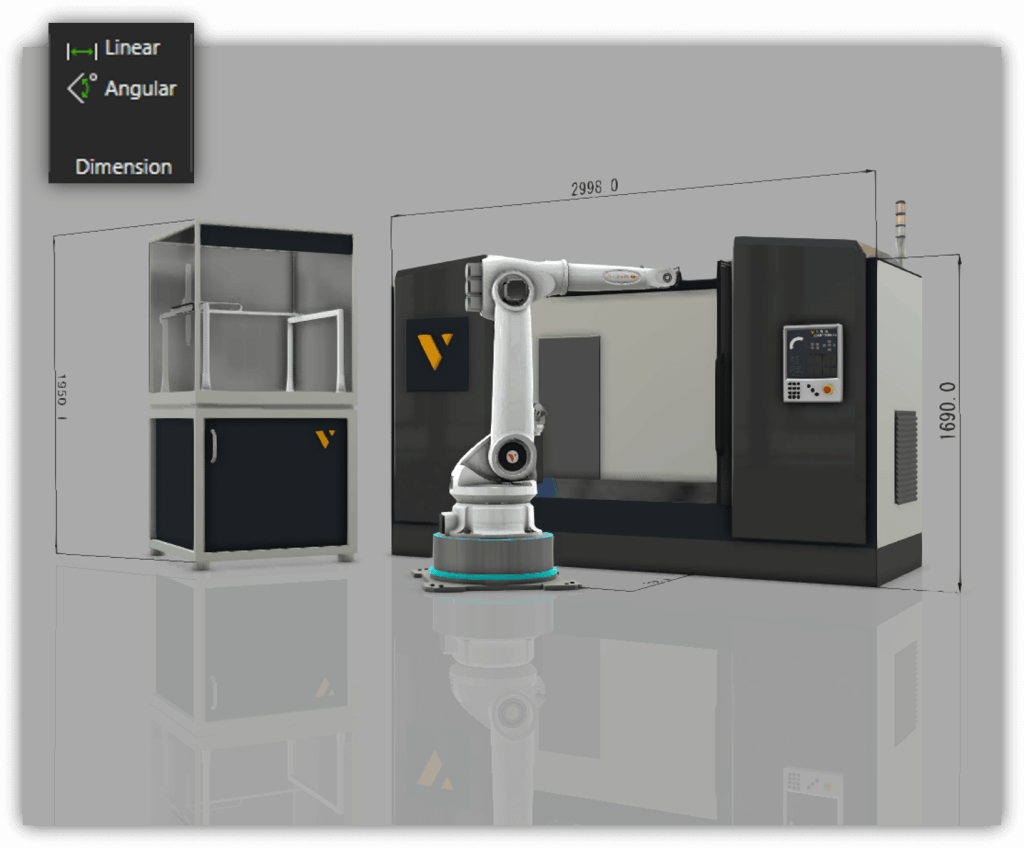
Dimensions in the 3D world
Add the dimensions in the 3D world to review and verify the reach of the robots and distance between the objects directly in the 3D workspace instead of using 2D drawings for measurement verifications.
Other Improvements
Check out the Release Notes to learn more about the features and maintenance updates in this release!
Further reading

Visual Components 5.0 – The fastest way from concept to reality
Visual Components 5.0 is here, and we’re excited to introduce this all-in-one manufacturing simulation platform now supercharged with major upgrades.
Introducing Visual Components 4.10 – Design beyond limits
Design beyond limits. That’s the promise of Visual Components 4.10. As manufacturing and robotics evolve, we continue to prioritize usability, ensuring that our tools not only keep up with industry...
Introducing Visual Components 4.9 – Craft with clarity
The latest version of our manufacturing simulation and robot offline programming solution is here, bringing improved clarity to production planning and optimization in manufacturing. With greater clarity, our users can...