Roboter Offline-Programmierung: Der komplette Leitfaden (mit Beispielen)
Dies ist Ihr vollständiger und umfassender Leitfaden zur Offline-Roboterprogrammierung (OLP). Nach einer Einführung in das Thema werden gängige Missverständnisse, die Probleme, die damit gelöst werden können, die Vorteile und Beispiele aus der Praxis für eine erfolgreiche Umsetzung behandelt.

Das Konzept der Roboter Offline-Programmierung (OLP) wird schon seit einigen Jahren diskutiert, aber wir sind der Meinung, dass die Fertigungsunternehmen den Wert von OLP noch immer nicht vollständig verstehen, insbesondere in Produktionsumgebungen, in denen Industrieroboter für Anwendungen wie Schweißen, Bearbeiten, Spritzen und mehr eingesetzt werden. In diesem Artikel wollen wir anhand der folgenden Themen mit allen Mythen rund um OLP aufräumen.
- Was ist OLP?
- Ein kurzer Überblick über die Geschichte der Roboter Offline-Programmierung
- Verbreitete Irrtümer und Missverständnisse über OLP
- Problempunkte im typischen Arbeitsablauf ohne OLP
- Vorteile von OLP
- Anwendungen von OLP
- Auswirkungen auf die Kleinserienfertigung
- Beispiele für erfolgreiche OLP-Fälle
- Warum OLP ein Standardwerkzeug für Hersteller mit Robotern sein sollte
- Die OLP-Lösung von Delfoi Robotics
Was ist OLP?
Roboter Offlineprogrammierung (OLP) ist eine Methode zur Erstellung von Roboterprogrammen in einer Computersoftware (virtuelle Umgebung) auf der Grundlage von 3D-CAD-Daten. Sobald das Roboterprogramm in der Software erstellt und überprüft wurde, kann es auf den physischen Roboter heruntergeladen werden.
Beginnen wir mit einem Beispiel, das verdeutlicht, warum Sie OLP verwenden sollten.
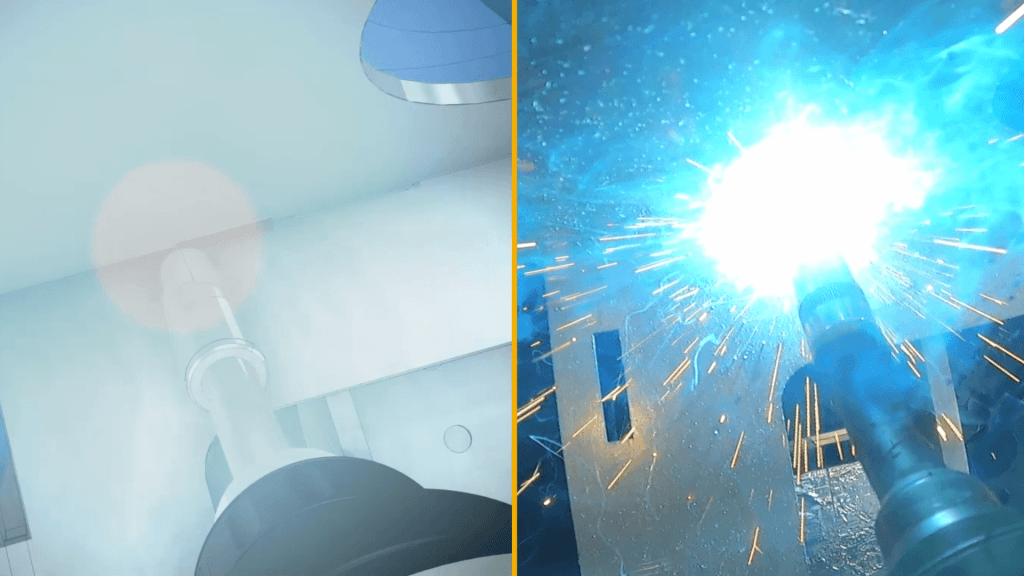
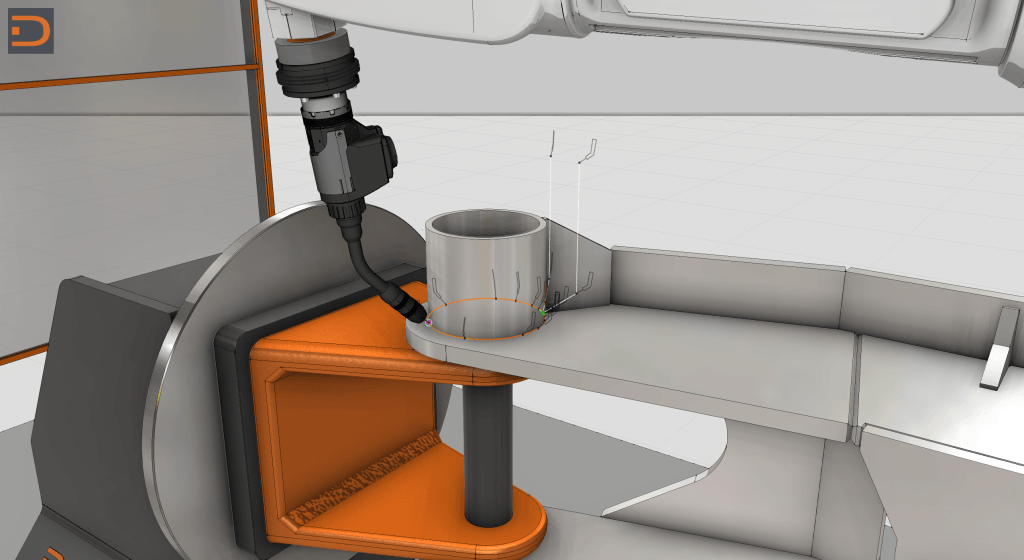
Stellen Sie sich vor, Sie programmieren einen Roboter, der ein kreisrundes Teil auf ein Metallwerkstück schweißen soll. Der Roboter muss den Schweißbrenner in einem 3D-Bogen um den Umfang des Teils bewegen und gleichzeitig eine präzise Ausrichtung in Bezug auf die Oberfläche beibehalten.
Sie können dies tun, indem Sie mit einem Teach Pendant Punkte einlernen, aber Sie werden eine Menge Punkte brauchen und es wird lange dauern. Der Abstand zwischen den Brennern wird mit Sicherheit variieren, ebenso wie die Ausrichtung der Brenner. Außerdem steht die Roboterzelle erst dann für die Produktion zur Verfügung, wenn Sie die Programmierung abgeschlossen haben. Dieser Stillstand kann Tage bis Wochen dauern.
Mit OLP ist die Erstellung des Roboterprogramms viel einfacher. Importieren Sie eine CAD-Datei der Schweißzelle in die OLP-Software und zeigen Sie den Weg, den der Brenner nehmen soll. Anschließend generiert die Software das Roboterprogramm und prüft das Programm z. B. auf mögliche Kollisionen. Nach der Überprüfung laden Sie das Programm in die Robotersteuerung herunter, lassen es einmal mit niedriger Geschwindigkeit laufen, um es zu überprüfen, und die Zelle ist bereit, die Arbeit wieder aufzunehmen.
Ein kurzer Überblick über die Geschichte der Roboter Offline-Programmierung
Die ersten Industrieroboter wurden durch Anlernen programmiert. Das heißt, der Arm wurde zu dem gewünschten Punkt bewegt und die Position gespeichert. (Für den Bediener oder Programmierer bedeutet dies, dass die Position (x,y,z-Koordinaten und Drehungen) des Werkzeugmittelpunkts (TCP) am Ende des Arms gespeichert wird, d. h. das Programm speichert die Position jedes Gelenkmotors).

Die Robotersimulation kam in den 1980er Jahren auf. Dabei wurden CAD-Daten verwendet, um den Roboter, seine Bewegungen und die Arbeitszelle oder Umgebung darzustellen. Wenig später wurden Techniken zur Nachbearbeitung der Positionsinformationen aus dem CAD-Programm entwickelt, um ein Roboterbewegungsprogramm zu erstellen, ähnlich wie bei der Erstellung von Bearbeitungsbahnen für CNC-Maschinen). Daraus ist OLP entstanden.
Heute gibt es zwei Arten von OLP. Die meisten Roboterhersteller bieten ein Roboterprogrammierpaket zusätzlich zu einem Programmierhandgerät an. Alternativ kann sich ein Roboterbenutzer für ein OLP-Produkt von einer unabhängigen Quelle entscheiden. Dies hat den Vorteil, dass es unabhängig von der Marke des zu programmierenden Roboters ist.
Eine wirksame OLP hängt von der Genauigkeit des CAD-Modells gegenüber der Arbeitszelle ab. Um vollständig zu erfassen, wie die Zelle tatsächlich aufgebaut ist, und nicht nur, wie sie im CAD-Modell dargestellt ist, müssen die Anwender ein Verfahren durchführen, das als Kalibrierung der Roboterzelle bezeichnet wird. Dazu werden eine Reihe von Referenzpunkten in der Zelle gemessen und die tatsächliche Position des Werkzeugmittelpunkts (TCP) des Roboters sowie die Positionen der Peripheriegeräte in OLP eingelesen. In diesem werden anschließend spezielle Kalibrierungsprogramme ausgeführt, um die tatsächliche Übereinstimmung zwischen dem Modell und der realen Zelle zu erreichen – die Meisterung des digitalen Zwillings. Die Messungen können mit dem Roboter selbst als Messgerät oder mit einer externen Messausrüstung wie 3D-Laserscannern durchgeführt werden.

Verbreitete Irrtümer und Missverständnisse über OLP
OLP gibt es zwar schon seit einigen Jahren, aber die Akzeptanz ist relativ gering. Dies ist zumindest teilweise auf ein mangelndes Verständnis dessen zurückzuführen, was OLP ist und wie es verwendet wird. Es ist an der Zeit, das Verständnis für dieses Thema zu verbessern.
#Nr. 1: OLP ist nur für große Hersteller
Dies rührt von der Annahme her, dass hohe Produktionsmengen erforderlich sind, um von OLP zu profitieren. Die Realität sieht jedoch etwas anders aus. OLP ist vor allem dann von Vorteil, wenn die Produktionsläufe kurz sind, häufig umgerüstet oder umgestellt wird und die Aufgaben sehr abwechslungsreich sind. Kleine und mittelgroße Hersteller können sehr von OLP profitieren, wenn sie Kleinserien produzieren.
#Nr. 2: OLP ist schwer zu bedienen
Wie jede Software erfordert auch OLP eine gewisse Einarbeitung und hat eine gewisse Lernkurve. Außerdem gibt es wahrscheinlich einige OLP-Produkte, die nicht besonders benutzerfreundlich sind. Die besten Produkte sind jedoch intuitiv, logisch und einfach zu bedienen, so dass auch Neulinge schnell damit zurechtkommen.
Unterschätzen Sie außerdem nicht die Komplexität der Programmierung per Teach-Pendant. Verschiedene Robotermarken haben unterschiedliche Befehle, und außerdem können sich die Systeme von älteren zu neueren Robotermodellen ändern. Das macht es noch komplizierter, die manuelle Programmierung zu verwenden.
#Nr. 3: OLP ist teuer
Ein OLP-Produkt ist eine zusätzliche Anschaffung. Es muss jedoch nur einmal gekauft werden und kann alle in einer Einrichtung verwendeten Robotermarken unterstützen. (Dies hilft einer Einrichtung auch, sich nicht an einen einzigen Roboterhersteller zu binden).
OLP-Anwender berichten von einer verbesserten Kapitalrendite ihrer Roboterzellen, da die Ausfallzeiten reduziert und die Roboterauslastung erhöht werden. Es gibt Belege dafür, dass es die programmierbedingten Ausfallzeiten von Robotern um bis zu 90 % reduzieren kann und sich bereits bei einem einzigen Projekt bezahlt machen kann.
#Nr. 4: OLP macht erfahrene Programmierer überflüssig
OLP-Software beschleunigt die Programmerstellung und verkürzt so die für die Programmierung benötigte Zeit, macht aber einen erfahrenen Programmierer nicht überflüssig. Bahnplanung und -optimierung, Kollisionsvermeidung und so weiter werden am besten von einem erfahrenen Programmierer erledigt. Mit OLP-Software können diese jedoch produktiver arbeiten, so dass sie mehr Zeit für komplexere Programmieraufgaben und Innovationen in einer sichereren Arbeitsumgebung haben.
Problempunkte im typischen Arbeitsablauf ohne OLP
Die Alternative zur Verwendung von OLP ist die Programmierung direkt am Roboter. Dabei gibt es mindestens drei Probleme.
- Risiko von Projektverzögerungen und zusätzlichen Kosten
- Sicherheitsbedenken
- Verlorene Produktionskapazität
Es besteht ein erhebliches Risiko von Projektverzögerungen, wenn die Programmierung am Roboter erfolgt. Bis zu diesem Punkt sind alle Werkzeuge und Vorrichtungen entworfen, gebaut und installiert worden. Die Förderbänder oder andere Materialhandhabungsgeräte sind eingerichtet und die Teile sind einsatzbereit. Erst jetzt kann der Programmierer mit dem Teachen von Punkten für den Roboter beginnen.
Es ist fast garantiert, dass Probleme auftreten werden. Vielleicht kann der Roboter eine bestimmte Stelle nicht erreichen, vielleicht befinden sich Teile an der falschen Stelle, oder vielleicht ist die angestrebte Zykluszeit nicht erreichbar.
In allen Fällen besteht die einzige Lösung darin, die Problemstellen der Zelle neu zu gestalten. Dies führt unweigerlich zu einer Verzögerung des Produktionsbeginns, möglicherweise um Wochen, und zu erheblichen zusätzlichen Kosten.
Das Einlernen von Punkten mit einem Hängegerät erfordert häufig, dass der Programmierer die Zelle betritt: Dies kann die einzige Möglichkeit sein, um zu sehen, wohin sich das Werkzeug bewegt, oder um zu prüfen, ob es zu Kollisionen kommt. Wenn der Roboter in den “Teach”-Modus versetzt wird, sollte er sicher sein, aber es besteht immer das Risiko einer unerwarteten Bewegung, entweder des Roboters selbst oder eines der anderen Mechanismen in der Zelle.
Während der Programmierer Punkte in der Arbeitszelle programmiert, kann der Roboter keine anderen Arbeiten erledigen. Dies ist alles unproduktive Zeit, bis der Programmierer fertig ist und das Programm sich bewährt hat. Und selbst die besten Programmierer neigen dazu, die für die Aufgabe benötigte Zeit zu unterschätzen!
Vorteile von OLP
Hersteller, die OLP-Software einsetzen, berichten von zahlreichen Vorteilen:
- Keine Ausfallzeit des Roboters:
- Die Programmierzeit werden um bis zu 80 % reduziert und die Roboterauslastung um bis zu 95 % erhöht, wodurch die Produktivität der Programmierer gesteigert und die Stillstandszeiten der Zellen reduziert wurden.
- Schnelle Einrichtungszeiten
- Weniger Zeitaufwand für die Einführung eines neuen Produkts in die Produktion – die Programmierung erfolgt gleichzeitig und nicht nacheinander
- Erhöhte Sicherheit
- Ein geringeres Risiko von Unfällen und Verletzungen
- Höhere und wiederholbare Qualität
- Die Roboterprogramme sind besser optimiert (kürzere Zykluszeiten, höhere Genauigkeit und Konsistenz), was zu einer höheren und wiederholbaren Produktionsqualität führt.
- Roboter sind marken- und prozessunabhängig
- Unabhängig von Robotermarken oder Prozesstypen kann eine fortschrittliche OLP-Software alle Anwendungen abdecken.
- Keine Überraschungen mehr
- Änderungen von Vorrichtungen und Werkzeugen in letzter Minute werden vermieden
Ein bedeutender zusätzlicher Nutzen ist der Beitrag, den OLP zum Design for Manufacturability (DfM) leistet. Dies ist in erster Linie darauf zurückzuführen, dass alle Beteiligten Zugang zu denselben Prozesskenntnissen haben und nicht auf unterschiedliche Normen, Systeme, Konstruktionsmethoden usw. zurückgreifen müssen. Durch die Parallelisierung der Programmierung mit dem Zelldesign und der Konstruktion ergeben sich außerdem mehr Möglichkeiten zur Optimierung von Designs für kürzere Zykluszeiten und bessere Produktqualität.
Anwendungen von OLP
Jede Roboteranwendung ist ein Kandidat für OLP; die einzige Voraussetzung ist, dass digitale Modelle der Arbeitszelle, der Teile, der Werkzeuge und der Vorrichtungen vorliegen. (Und da heute alles in CAD entworfen wird, sollte das kein Problem sein.) Die Vorteile werden jedoch umso größer, je komplexer die Roboterbahnen werden und je mehr Punkte eingelernt werden müssen.
Unter Berücksichtigung dieser Punkte sind einige der besten Anwendungsfälle für OLP:
- Schweißen – Zugang und Orientierung sind besondere Herausforderungen, bei denen OLP hilft, und komplexe Schweißnähte können eine große Anzahl von Punkten erfordern
- Beschichtung (Lackierung) – wie beim Schweißen ist die Ausrichtung wichtig, ebenso wie eine einheitliche Lackdicke und ein einheitlicher Abstand sowie die Gewährleistung, dass alle Bereiche optimal erreicht und lackiert werden können.
- Dispensen – viele Montagevorgänge erfordern das Auftragen langer, komplexer Klebstoffraupen: OLP hilft dabei, die Werkzeugbahnen schnell und mit gleichbleibender Qualität offline zu erstellen.
- Bearbeitung (Oberfläche) – Anwendungen wie Perlstrahlen und Entgraten erfordern oft lange, komplizierte Pfade, die eine Vielzahl von Punkten benötigen
- Montageanwendungen (ohne Vorrichtungen) – Greif- und Einsetzbewegungen erfordern eine präzise Steuerung der Greiferausrichtung, die mit OLP in höherem Maße erreicht wird.
- Materialtransportanwendungen – Mit OLP kann ein Programmierer die schnellste Strecke zwischen zwei Orten ermitteln, die nicht immer die naheliegendste Route ist.
- Schneiden – Plasma-, Laser- oder Wasserstrahlschneiden mag für Standardteile funktionieren, aber für komplexe Geometrien werden Roboter mit genauen Schnittmustern benötigt, die mit OLP erzeugt werden können.
Auswirkungen auf die Kleinserienfertigung
Zwar kann jeder Hersteller, der Roboter einsetzt, von OLP profitieren, doch die größten Vorteile ergeben sich bei kleinen Losgrößen und kurzen Produktionsläufen. Das Problem ist, dass bei der Programmierung am Roboter häufiges Umrüsten und Einrichten zu Lasten der Verfügbarkeit und der Betriebsstunden geht. Mit OLP werden die Programme jedoch virtuell getestet und auf die Roboter heruntergeladen, während die physischen Aspekte der Zelle (Vorrichtungen, Greifer usw.) geändert werden. Es empfiehlt sich, den Roboter einen Zyklus bei niedriger Geschwindigkeit durchlaufen zu lassen, um ihn auf Kollisionen zu prüfen.
Darüber hinaus werden konstruktionsbedingte Probleme in der Dokumentation oder in den Modellen im Voraus erkannt und können an andere Teams weitergegeben und gelöst werden, ohne dass es zu Produktionsausfällen kommt.
Beispiele für erfolgreiche OLP-Fälle
Afrit, ein südafrikanischer Hersteller von großen Anhängern, führte OLP ein. Der Zeitaufwand für die Roboterprogrammierung konnte von zwei Wochen in der Zelle auf vier Tage offline reduziert werden. Ferdi Beukes, Mechatronik-Ingenieur bei Afrit, sagt:
Wir haben mehr Zeit für die Verbesserung des Schweißens und anderer Systeme, weil wir keine Zeit für die manuelle Programmierung und die Nachbesserung der Programmierung benötigen
Volvo setzt OLP in seinen Produktionsbereichen für knickgelenkte Dumper und Radlader ein. Eine Pilotzelle, die auf eine Familie von Komponenten mit hohem Variantenreichtum und geringen Stückzahlen ausgerichtet ist, nutzt OLP für das “vorrichtungslose Schweißen” in einer Zelle mit zwei Robotern, einem für die Handhabung und einem für das Schweißen.
In Finnland führt HT Laser robotergestütztes Schneiden und Schweißen von Kleinserien mit Robotern verschiedener Hersteller durch. Das Unternehmen hat OLP eingeführt, um Programmierzeit zu sparen und die Produktionskapazität zu erhöhen. Janne Tuominen, Product Development Manager bei HT Laser, sagt:
Die Vorteile der Offline-Programmierung werden in unserer Produktion jeden Tag umgesetzt. Der größte Vorteil ist die Zeitersparnis, da die Programmierung ohne Unterbrechung der Produktion und ohne teure Maschinen durchgeführt werden kann. Die Zeitersparnis wird auch durch bestimmte Software-Makros erreicht, die den Programmierprozess beschleunigen. Die Offline-Programmierung löst auch das Problem, wenn das geschweißte Teil groß ist oder sich an einem Ort befindet, der schwer oder unsicher zu besteigen ist
Warum OLP ein Standardwerkzeug für Hersteller mit Robotern sein sollte
Angesichts des Produktivitätssprungs, den OLP bietet, sind Roboteranwender, die an der manuellen Programmierung an der Arbeitszelle festhalten, im Nachteil. OLP:
- Ist eine kostengünstige Lösung für die Roboterprogrammierung
- Reduziert den Bedarf an physischen Tests und Debugging von Robotern
- Verbessert die Sicherheit und verringert das Risiko von Unfällen und Verletzungen
- Ermöglicht eine schnellere und genauere Programmierung
Die OLP-Lösung von Delfoi Robotics
Visual Components ist seit langem führend in der 3D-Fertigungssimulation. Da OLP aus der Robotersimulation hervorgegangen ist, ergänzen sich die beiden Technologien. Aus diesem Grund erwarb die Visual Components Group im Oktober 2022 die OLP-Software von Delfoi Robotics (die auf der Visual Components-Plattform aufbaut).
Das macht die OLP-Lösung von Delfoi so einzigartig:
- Intuitiv, schnell zu erlernen
- Layout- und prozessunabhängig – eine Software deckt die meisten Roboteranwendungen ab (Schweißen, Bearbeiten, Beschichten)
- Roboterunabhängig – diese Software deckt OLP für alle wichtigen Marken ab, einschließlich 17 Postprozessoren in einem Produkt (weitere werden in Zukunft hinzugefügt) und 40 Robotersteuerungsversionen (alte und neue)
- Institutionalisiert und speichert Kernprozesswissen und macht es allen an der Produkt-, Zellen- und Vorrichtungsentwicklung Beteiligten zugänglich.
- Extrem schnelle, automatisierte und zuverlässige Programmerstellung und -validierung.
- Intelligente und automatische Werkzeuge zur Lösung von Roboterprogrammproblemen.
- Wird in über 30 Ländern verwendet und unterstützt mehrere Sprachen.
Es ist an der Zeit, zur Roboter Offline-Programmierung überzugehen
Die manuelle Programmierung eines Roboters an der Arbeitszelle ist langsam und unvollkommen. Sie bindet die Zelle für Tage oder Wochen und verzögert den Produktionsbeginn. OLP löst diese Probleme, indem es die Programmierung in einer virtuellen Umgebung ermöglicht. Sobald das Programm fertig und überprüft ist, wird es auf den Roboter heruntergeladen und die Produktion kann beginnen.
OLP verschafft Herstellern erhebliche Geschwindigkeits-, Kosten-, Effizienz- und Qualitätsvorteile gegenüber denen, die es nicht nutzen. Die Delfoi Robotics OLP-Lösung von Visual Components ist einfach zu erlernen und funktioniert mit allen führenden Robotermarken. Wenn Sie bereit sind, loszulegen, kontaktieren Sie uns noch heute.
Zum Weiterlesen
Der komplette Leitfaden zur ABB-Roboterprogrammierung und Offline-Programmierung
Meistere die ABB-Roboterprogrammierung mit Offline-Programmierung (OLP). Dieser umfassende Leitfaden zeigt dir, wie du MultiMove-Zellen für synchronisiertes Schweißen effizient programmierst, den OLP-Workflow optimierst und die passende Software für deine Produktion auswählst:...

Schnelle und einfache Roboter-Offline-Programmierung (OLP) für das Schweißen: ein praxisnaher No-Code-Workflow
Roboter-Offline-Programmierung (OLP) macht das robotergestützte Schweißen schneller, planbarer und einfacher zu handhaben, insbesondere in High-Mix-/Low-Volume-Umgebungen. Dieser Leitfaden beschreibt den grundlegenden OLP-Workflow: von der digitalen Zellenkonfiguration über Werkzeuge und Koordinatensysteme bis...
Wie Offline-Programmierung die Effizienz beim robotergestützten Schweißen steigert
OLP-Software macht das Roboterschweißen effizienter, indem sie es Herstellern ermöglicht, Roboterprogramme direkt in einer digitalen Umgebung zu erstellen und zu optimieren. Sie unterstützt eine Vielzahl von Prozessen, darunter Lichtbogenschweißen, Laserschweißen,...