Fortgeschrittene Roboter-Offline-Programmierung für das Schweißen: Vorlagen und automatische Bahnoptimierung
Erfahre, wie fortgeschrittene Roboter-Offline-Programmierung Herstellern hilft, das Schweißen effizienter zu planen und zu programmieren. Dieser Leitfaden erklärt strukturierte OLP-Workflows, wiederverwendbare Schweißvorlagen, Schweißdatenbanken und automatische Bahnplanung und zeigt, wie sich komplexe Baugruppen, hohe Produktvariation und High-Mix-Low-Volume-Fertigung auch ohne Programmierkenntnisse effizient bewältigen lassen.

In unserem vorherigen Leitfaden zur schnellen und einfachen Roboter-Offline-Programmierung (OLP) für das Schweißen haben wir einen praxisnahen No-Code-Workflow vorgestellt, mit dem du Roboterschweißbahnen erstellen und validieren kannst. Dieser Ansatz eignet sich ideal für den Einstieg und dafür, schnell ersten Mehrwert zu schaffen. Mit wachsender Produktionskomplexität reichen grundlegende Workflows jedoch oft nicht mehr aus.
Fortgeschrittene Roboter-Offline-Programmierung setzt auf Skalierbarkeit, Wiederverwendbarkeit und Automatisierung. Anstatt Schweißnähte einzeln zu programmieren, bauen Teams strukturierte Systeme auf, mit denen sich komplexe Baugruppen, wiederkehrende Schweißmuster und eine hohe Variantenvielfalt effizient bewältigen lassen. Dieser Artikel zeigt, wie ein fortgeschrittener OLP-Workflow in der Praxis aussieht und wie er moderne robotergestützte Schweißumgebungen unterstützt.
Fortgeschrittener Workflow für die Roboter-Offline-Programmierung: Ein Überblick
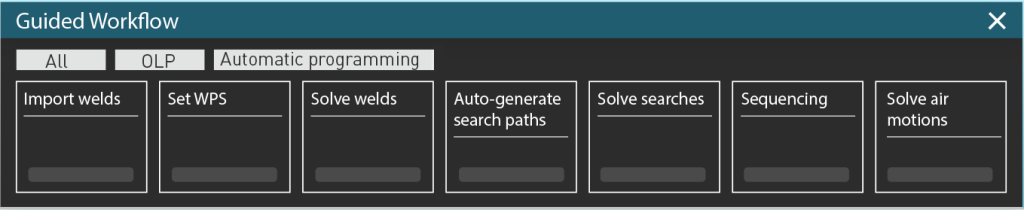
Ein fortgeschrittener Workflow für die Roboter-Offline-Programmierung im Schweißen gliedert den Prozess in wiederholbare und skalierbare Schritte. Auch wenn jedes Unternehmen den Workflow an seine spezifischen Anforderungen anpasst, umfasst ein typischer Ablauf:
- Modellvorbereitung und Import – Starte mit CAD-Modellen des Bauteils oder der Baugruppe. Stelle sicher, dass Schweißnähte, Verbindungen und Spannvorrichtungen klar definiert und mit dem Layout der Roboterzelle abgestimmt sind. Eine saubere Vorbereitung sorgt für eine präzise Simulation und verhindert Fehler in späteren Prozessschritten.
- Erkennung von Schweißmerkmalen und Zuweisung von Vorlagen – Identifiziere Schweißmerkmale automatisch oder manuell und weise ihnen anschließend vordefinierte Vorlagen zu, die Brennerausrichtung, Bewegungsmuster und Prozesseinstellungen festlegen. Vorlagen halten bewährte Strategien fest, verbessern die Konsistenz und ermöglichen die Wiederverwendung über mehrere Bauteile hinweg.
- Programmgenerierung mit einer Schweißdatenbank – Wende standardisierte Parameter aus einer Schweißdatenbank auf alle Schweißnähte an. Dazu gehören Prozesseinstellungen, Geschwindigkeiten und Schweißanweisungen (WPS). So reduzierst du den manuellen Einrichtungsaufwand und sorgst für einheitlichere Ergebnisse unabhängig davon, wer das Programm erstellt.
- Automatische Bahnplanung und Kollisionsprüfung – Nutze automatische Solver, um Kollisionen zu erkennen, Achsgrenzenverletzungen zu identifizieren und Roboterbewegungen zu optimieren. Dieser Schritt sorgt für kollisionsfreie, effiziente Bahnen, ohne dass zeitaufwendige Trial-and-Error-Anpassungen nötig sind.
- Simulation und Validierung – Simuliere die gesamte Schweißsequenz in einer virtuellen Umgebung und prüfe Erreichbarkeit, Zykluszeiten und mögliche Probleme, bevor das Programm auf realen Robotern ausgeführt wird.
- Programmexport an die Robotersteuerung – Nach der Validierung exportierst du das optimierte Programm an die Robotersteuerung und stellst sicher, dass die simulierten Parameter mit den realen Produktionseinstellungen übereinstimmen.
Dieser strukturierte Workflow maximiert die Wiederverwendung, reduziert den manuellen Aufwand und sorgt für konsistente, hochwertige Schweißprogramme.
Warum ein fortgeschrittener OLP-Workflow im Schweißen skalierbar ist
Im Gegensatz zur grundlegenden Offline-Programmierung, die sich auf die Erstellung einzelner Roboterbahnen konzentriert, ist fortgeschrittene OLP darauf ausgelegt, auch bei komplexen Bauteilen und Produktionsumgebungen mit hoher Variantenvielfalt effizient zu skalieren. Der Schwerpunkt verlagert sich dabei von einmaligen Programmieraufgaben hin zu einem wiederholbaren Rahmen, der langfristige Effizienz unterstützt.
Skalierbarkeit entsteht, wenn Schweißwissen in wiederverwendbaren Bausteinen organisiert und zeitaufwendige Optimierungsaufgaben automatisiert werden. Vorlagen, Schweißdatenbanken und automatische Path Solver arbeiten zusammen, um manuellen Nachbearbeitungsaufwand zu reduzieren, die Konsistenz zu verbessern und einen planbaren Durchsatz aufrechtzuerhalten, auch wenn die Bauteilkomplexität oder Variantenvielfalt zunimmt.
Für Hersteller, die große Schweißkonstruktionen fertigen oder ihre Designs häufig anpassen, sorgt ein skalierbarer OLP-Workflow für eine schnellere Roboterprogrammierung, weniger Fehler und eine bessere Nutzung der Engineering-Ressourcen.
Wie Schweißvorlagen die Roboter-Offline-Programmierung standardisieren
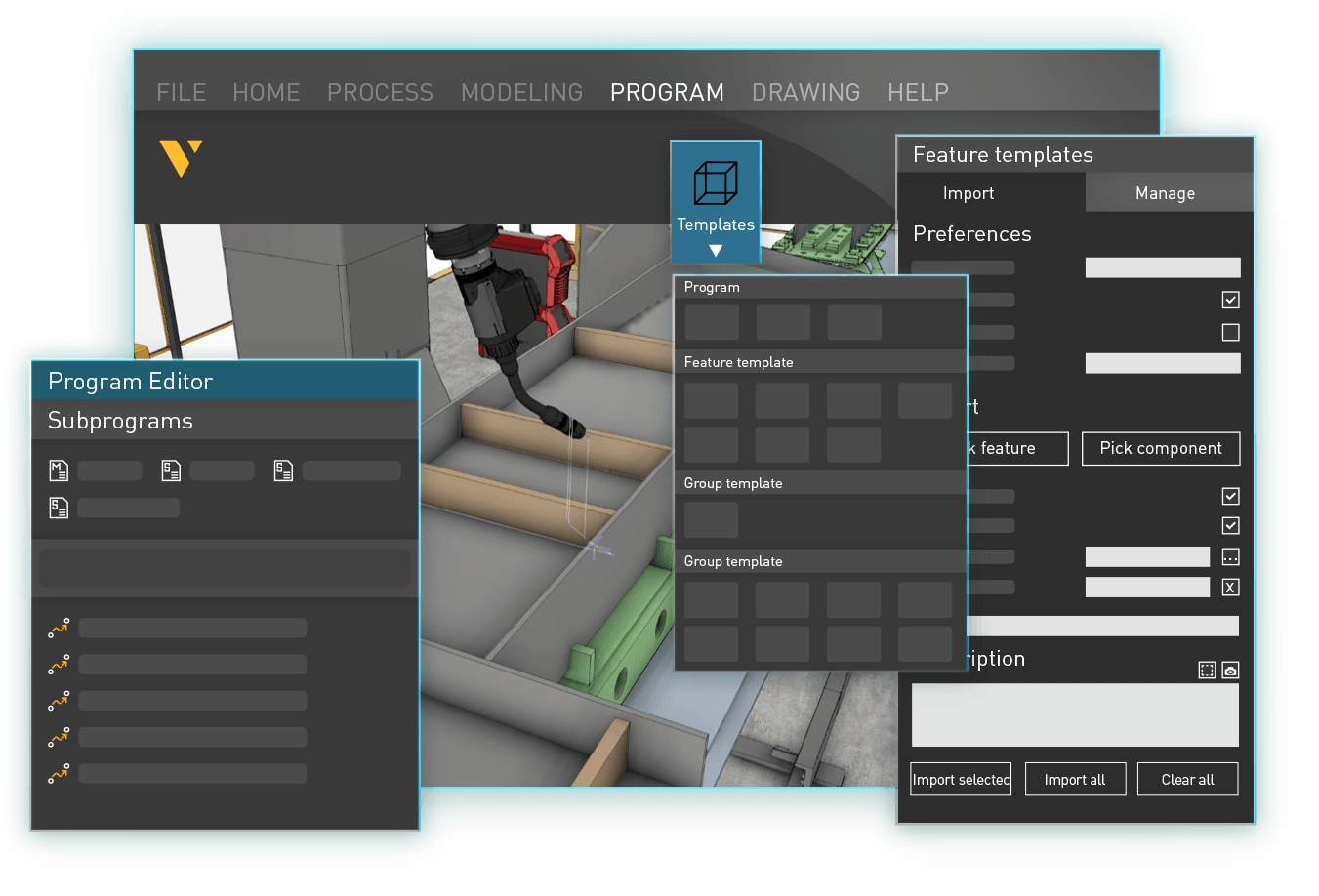
Schweißvorlagen sind ein zentrales Element fortgeschrittener Workflows im robotergestützten Schweißen. Sie halten bewährte Programmierstrategien fest und machen sie wiederverwendbar. Eine Vorlage definiert, wie sich eine Schweißnaht verhält, einschließlich Brennerausrichtung, Bewegungsmustern, An- und Abfahrverhaltens sowie Prozesseinstellungen.
Anstatt Schweißbahnen für jedes neue Bauteil neu zu erstellen, können Ingenieure Vorlagen für vergleichbare Bauteile verwenden und so deutlich schneller zuverlässige Schweißprogramme erzeugen. Vorlagen verbessern sowohl die Programmiergeschwindigkeit als auch die Prozessstabilität und verringern Unterschiede zwischen Programmierern sowie zwischen einzelnen Schichten. In Produktionsumgebungen mit hoher Variantenvielfalt können Teams so schneller auf neue Bauteilvarianten reagieren und gleichzeitig eine gleichbleibende Qualität sicherstellen.
Wie eine Schweißdatenbank für mehr Konsistenz sorgt
Eine Schweißdatenbank erweitert das Prinzip von Vorlagen, indem sie wiederverwendbares Wissen in einem strukturierten System organisiert. Sie speichert Schweißparameter, Bewegungseinstellungen und WPS-Daten, die projektübergreifend angewendet werden können.
Indem alle diese Informationen zentral an einem Ort gepflegt werden, verringert fortgeschrittene OLP die Abhängigkeit von individuellem Erfahrungswissen, macht Prozesse besser wiederholbar und stellt sicher, dass die Simulation mit der realen Produktion übereinstimmt. Neue Programmierer können sich an etablierten Standards orientieren, während erfahrene Ingenieure die Datenbank weiter verfeinern und ausbauen. Mit der Zeit wird die Schweißdatenbank zu einer gemeinsamen Wissensbasis, die Zusammenarbeit, Einarbeitung und systematische Prozessoptimierung unterstützt.
Wie automatische Path Solver Kollisionen reduzieren
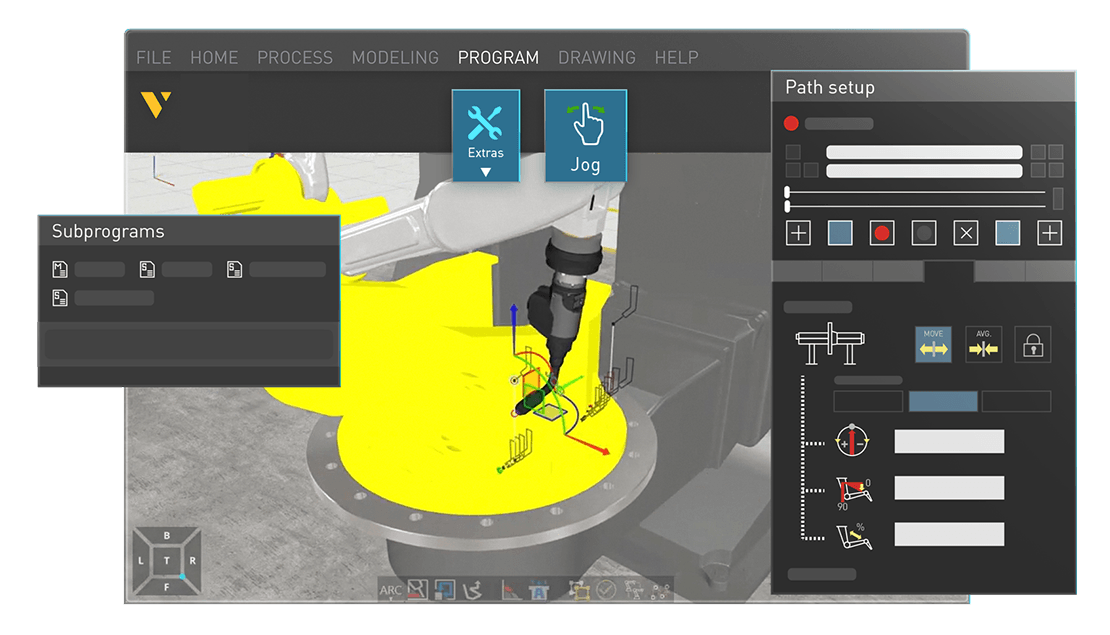
Automatische Path Solver lösen eine der zeitaufwendigsten Aufgaben in der Schweißsimulation: die Kollisionsvermeidung und Bewegungsoptimierung. Der Solver analysiert Roboterbewegungen, erkennt potenzielle Kollisionen, Achsgrenzenverletzungen und ineffiziente Übergänge zwischen Schweißnähten und erzeugt anschließend automatisch sicherere und effizientere Bahnen.
Das reduziert den Bedarf an manuellen Korrekturen an einzelnen Bahnpunkten, verkürzt Debugging-Schleifen und erhöht das Vertrauen in das simulierte Programm. Automatische Solver sind besonders in großen oder dicht belegten Schweißzellen wertvoll, in denen die manuelle Optimierung fehleranfällig sein kann. Sie tragen dazu bei, zuverlässige Roboterbewegungen sicherzustellen und gleichzeitig Zykluszeit und Prozessstabilität aufrechtzuerhalten.
Wie fortgeschrittene OLP-Workflows die High-Mix-Low-Volume-Fertigung unterstützen
Fortgeschrittene Roboter-Offline-Programmierung ist besonders effektiv in High-Mix-Low-Volume-Schweißumgebungen, in denen Flexibilität entscheidend ist. Durch die Wiederverwendung von Vorlagen und datenbankgestütztem Wissen können Programmierer neue Bauteilvarianten schnell anpassen, ohne jedes Mal bei null anfangen zu müssen.
Strukturierte Workflows in Kombination mit automatischer Optimierung ermöglichen es Herstellern, mit Variantenvielfalt umzugehen, ohne an Effizienz zu verlieren. Anstatt jeden neuen Auftrag als eigene Programmieraufgabe zu behandeln, bauen Teams auf einem bestehenden Rahmen auf, der schnelle Anpassungen unterstützt. Diese Fähigkeit wird zu einem entscheidenden Wettbewerbsvorteil, wenn die Nachfrage nach kundenspezifischen Lösungen und kürzeren Durchlaufzeiten steigt.
Wie fortgeschrittene OLP die Schweißprogrammierung um das Fünffache beschleunigt
In der Praxis wird der Unterschied zwischen grundlegender und fortgeschrittener Roboter-Offline-Programmierung besonders deutlich, wenn man Programmierzeit und Workflow-Effizienz betrachtet. In einem grundlegenden OLP-Workflow müssen Programmierer zunächst das Werkstück und die Zeichnungen prüfen, Schweißbahnen manuell erstellen, Bahnprüfungen durchführen und die Bahnen anschließend anpassen, bevor sie die Schweißparameter festlegen. Dieser Prozess ist nicht nur zeitaufwendig, sondern verzögert auch eine entscheidende Erkenntnis: ob die Schweißbahn überhaupt realisierbar ist.
Mit einem fortgeschrittenen Workflow für die Roboter-Offline-Programmierung lässt sich dieser Prozess deutlich verschlanken. Schweißbahnen können direkt importiert werden, Schweißparameter werden automatisch über vordefinierte Schweißanweisungen (WPS) zugewiesen, und der Path Solver passt die Bahnen sofort an und validiert sie. Dadurch können Programmierer viel früher im Prozess erkennen, ob eine Schweißnaht realisierbar ist, ohne mehrere manuelle Zwischenschritte durchlaufen zu müssen.
In einem typischen Vergleich dauert die Erstellung von Schweißbahnen mit einem grundlegenden OLP-Workflow rund 36 Minuten, während dieselbe Aufgabe mit fortgeschrittener OLP etwa 7 Minuten in Anspruch nimmt – also rund 80 % weniger Programmierzeit. Die größte Zeitersparnis entsteht dadurch, dass Trial-and-Error bei der Bahnerstellung entfällt und die Schweißbarkeit sofort bewertet werden kann. So können Teams schneller und mit mehr Sicherheit weiterarbeiten.
Wann sich ein fortgeschrittener OLP-Workflow lohnt
Hersteller erreichen diesen Punkt in der Regel dann, wenn grundlegende Methoden der Offline-Programmierung mit den Anforderungen der Produktion nicht mehr Schritt halten. Anzeichen dafür sind wiederholte manuelle Anpassungen, häufige Fehlerbehebung bei Kollisionen und ein wachsender Aufwand, ähnliche Schweißprogramme projektübergreifend zu verwalten.
Der Umstieg auf fortgeschrittene OLP bedeutet nicht, dass visuelle oder No-Code-Workflows aufgegeben werden müssen. Stattdessen geht es darum, bestehende Vorgehensweisen in einem strukturierten System zu organisieren, das Skalierbarkeit unterstützt. Teams, die mit komplexen Baugruppen oder hoher Produktvariation in unterschiedlichen industriellen Prozessen arbeiten, können so schneller programmieren, verlässlichere Ergebnisse erzielen und ihre Engineering-Ressourcen besser nutzen.
Häufig gestellte Fragen
Ein fortgeschrittener Workflow für die Roboter-Offline-Programmierung ist darauf ausgelegt, die Programmierung über komplexe Bauteile oder Produktionsumgebungen mit hoher Variantenvielfalt hinweg effizient zu skalieren. Er kombiniert wiederverwendbare Schweißvorlagen, automatische Path Solver, Kollisionsoptimierung und Schweißdatenbanken, um strukturierte und wiederholbare Programmiersysteme aufzubauen.
Grundlegende OLP konzentriert sich auf die Erstellung einzelner Roboterbahnen. Fortgeschrittene OLP bringt Wiederverwendung und Automatisierung durch Vorlagen und Datenbanken ins Spiel, reduziert manuelle Korrekturen und verbessert die Konsistenz über verschiedene Projekte hinweg.
Schweißvorlagen speichern bewährte Schweißstrategien, die sich auf ähnliche Schweißaufgaben übertragen lassen. Das beschleunigt die Programmierung und sorgt für eine gleichbleibende Prozessqualität.
Eine Schweißdatenbank organisiert wiederverwendbares Schweißwissen wie Vorlagen und WPS-Parameter. Sie hilft dabei, die Programmierung zu standardisieren und wiederholbare Ergebnisse sicherzustellen.
Automatische Solver erzeugen kollisionsfreie und optimierte Bewegungen, ohne dass umfangreiche manuelle Anpassungen nötig sind. Das verkürzt die Debugging-Zeit und verbessert die Zuverlässigkeit der Simulation.
Nein. Fortgeschrittene OLP baut auf visuellen No-Code-Workflows auf und konzentriert sich auf strukturierte Wiederverwendung statt auf manuelle Roboterprogrammierung.
