Lösungen
Roboter Programmierung
Mit der Roboter-Offline-Programmierung kannst du Industrieroboter für verschiedene Prozesse programmieren, ohne die Produktion zu unterbrechen. Erstelle effiziente, fehlerfreie Roboterprogramme auf Computern mit deinen 3D-CAD-Daten und lade sie auf den physischen Roboter herunter.

Schnellere Amortisation der Roboterinvestition
Programmiere Roboter 10-mal schneller, ohne die Produktion zu unterbrechen. Sorge für eine schnelle Inbetriebnahme des Roboters und minimale Stillstandszeit. Speichere deine Programme und nutze sie wieder für zukünftige Projekte, um die Effizienz und Produktivität zu steigern.

Verbessert die Produktionseffizienz
Stelle sicher, dass die Produkte stets nach den höchsten Qualitätsstandards hergestellt werden, indem du die Roboterbewegungen und -prozesse so optimierst, dass sie höchste Effizienz und Präzision bei minimalen Ausfallzeiten der Roboter erreichen.

Unterstützt Design for Manufacturing (DFM)
Vermeide Änderungen an Vorrichtungen und Werkzeugen in letzter Minute. Teste und korrigiere gründlich die virtuellen Modelle der Roboterzelle und des Produktionsaufbaus lange vor der eigentlichen Produktion.
Warum solltest du deine Roboter offline programmieren?
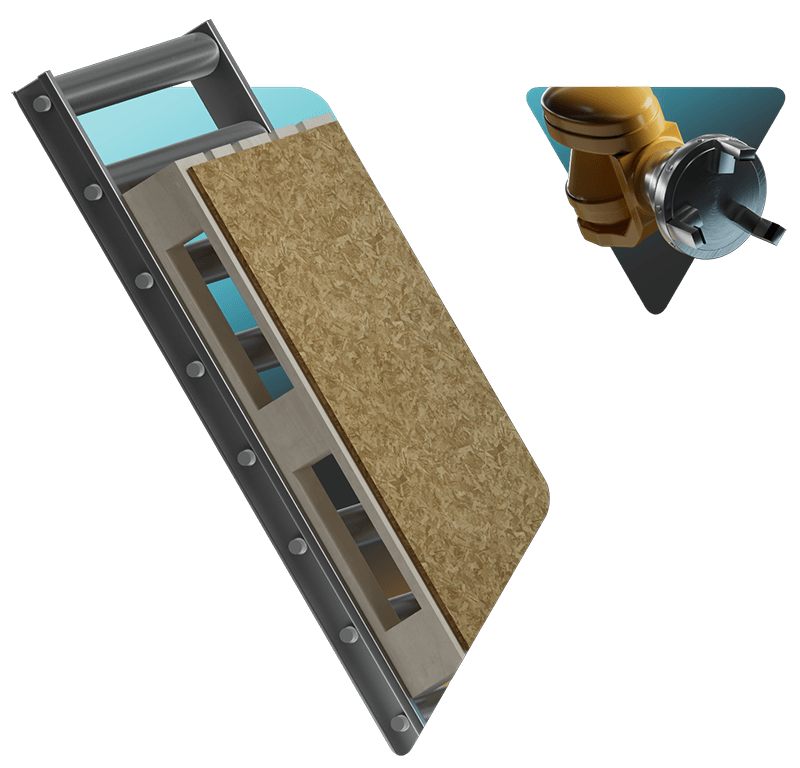
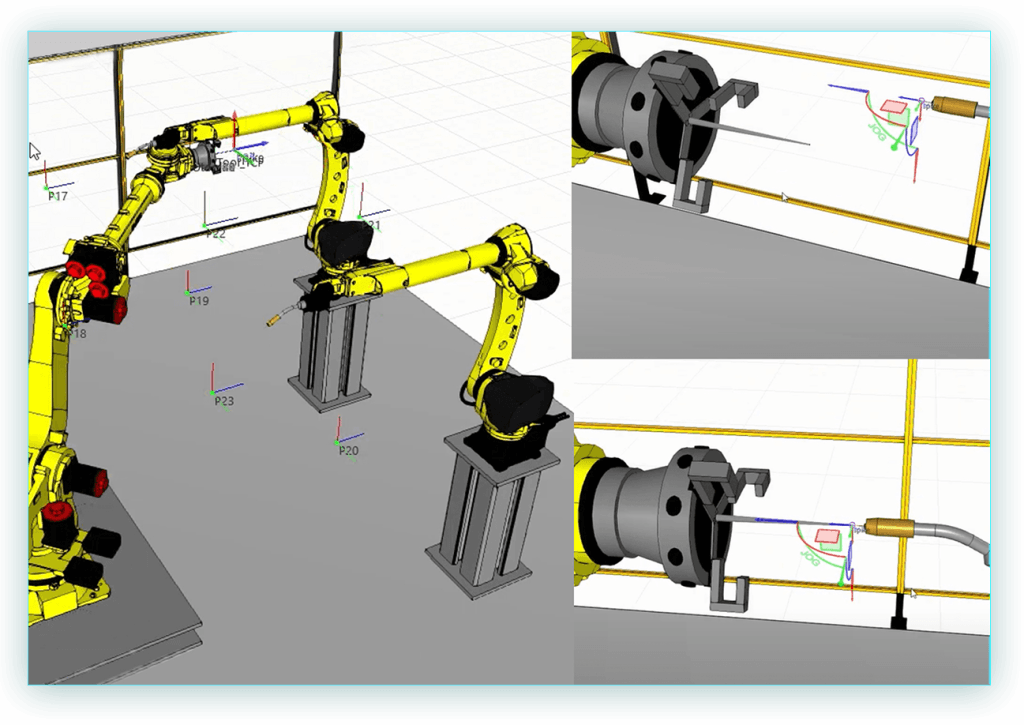
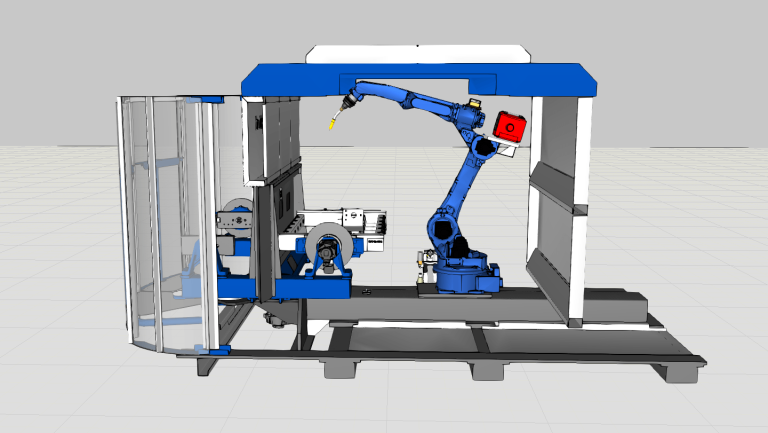
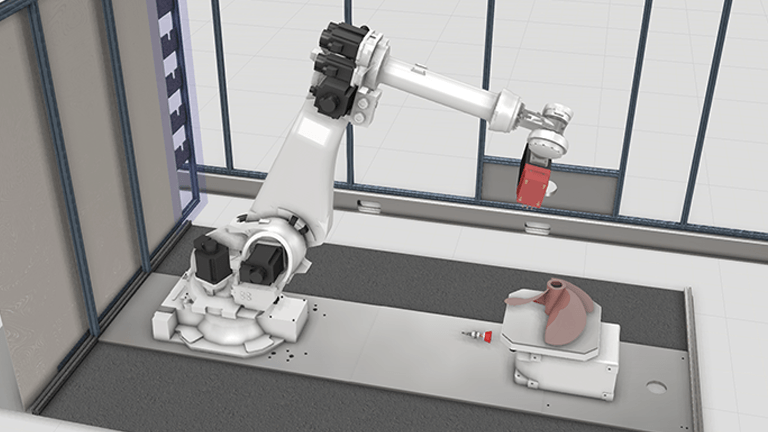
Stell dir vor, du programmierst einen Roboter, der ein kreisförmiges Teil auf ein Metallwerkstück schweißen soll. Der Roboter muss den Schweißbrenner in einem 3D-Bogen um den Umfang des Teils bewegen und gleichzeitig eine genaue Ausrichtung zur Oberfläche beibehalten.
Du kannst dies tun, indem du mit einem Pendel Punkte einlernst, aber du brauchst dafür viele Punkte und es dauert sehr lange. Der Abstand zwischen den Brennern wird mit Sicherheit variieren, ebenso wie die Ausrichtung der Brenner. Außerdem steht die Roboterzelle erst dann für die Produktion zur Verfügung, wenn du die Programmierung abgeschlossen hast. Diese Ausfallzeit kann Tage bis Wochen dauern und zu Produktionsausfällen führen.
Mit der Roboter-Offline-Programmierung erstellst du Roboterprogramme schneller, einfacher und genauer. Indem du ein CAD-Modell der Schweißzelle in die Offline-Programmiersoftware importierst, kannst du ganz einfach den gewünschten Brennerweg definieren. Die Software generiert und prüft dann das Roboterprogramm auf Probleme wie mögliche Kollisionen. Sobald das Programm verifiziert ist, lädst du es einfach auf die Robotersteuerung, führst zur Kontrolle einen Test mit niedriger Geschwindigkeit durch, und die Zelle ist bereit, die Produktion wieder aufzunehmen.
Was ist Roboter-Offline-Programmierung?
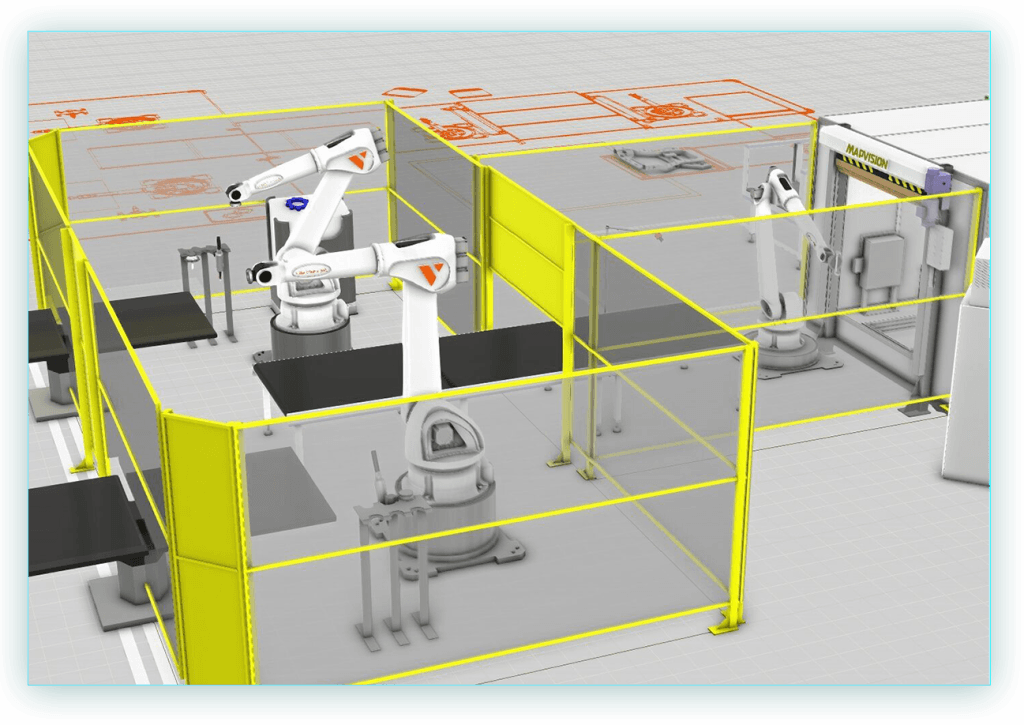
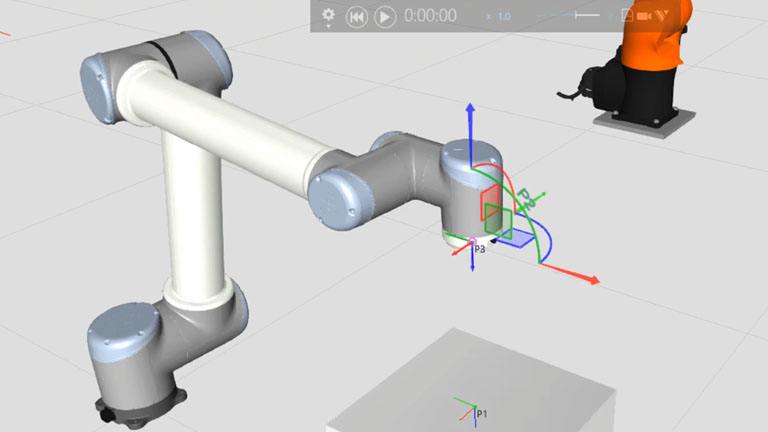
Die Roboter-Offline-Programmierung ist eine Methode zur Programmierung von Robotern, ohne direkt am physischen Roboter zu arbeiten oder die Produktion zu unterbrechen. Durch die Verwendung virtueller Modelle des Roboters und seiner Umgebung kannst du Roboterarbeiten in einem digitalen Raum planen, programmieren und optimieren.
Sobald das Programm auf Genauigkeit und Sicherheit hin überprüft wurde, wird es zur Ausführung auf die Robotersteuerung heruntergeladen. Dieser Ansatz verkürzt die Programmierzeit, erhöht die Präzision und maximiert die Produktionszeit, da der Betrieb während der Programmierung nicht unterbrochen werden muss.
Dies ist entscheidend für die Vorplanung komplexer Roboteroperationen, um Effizienz zu gewährleisten und Risiken zu minimieren. Hersteller, die OLP-Software einsetzen, berichten von einer 80%igen Reduzierung der Roboterprogrammierzeit und einer 95%igen Steigerung der Roboterauslastung.
Entwicklung der Roboterprogrammierung
Die Roboterprogrammierung hat sich im Laufe der Jahre erheblich weiterentwickelt. Anfangs wurden Roboter manuell programmiert, indem der Roboterarm physisch in die gewünschten Positionen bewegt wurde. In den 1980er Jahren ermöglichte die CAD-Technologie die Robotersimulation und die Offline-Programmierung, bei der CAD-Daten in Roboterbewegungsprogramme umgewandelt wurden.
Heutzutage unterstützt moderne Software zur Roboterprogrammierung verschiedene Roboter und bietet automatisierte Programmierung und Lösungen zur Kollisionsvermeidung, die Effizienz und Genauigkeit steigern. Die Kalibrierung der Roboterzelle stellt sicher, dass das virtuelle Modell mit der realen Arbeitszelle übereinstimmt, und erzeugt so einen digitalen Zwilling.
Die ersten Industrieroboter wurden durch Anlernen programmiert. Das heißt, der Arm wurde zu dem gewünschten Punkt bewegt und die Position gespeichert. (Für den Bediener oder Programmierer bedeutet dies, dass die Position (x,y,z-Koordinaten und Drehungen) des Werkzeugmittelpunkts (TCP) am Ende des Arms gespeichert wird, d. h. das Programm speichert die Position jedes Gelenkmotors).
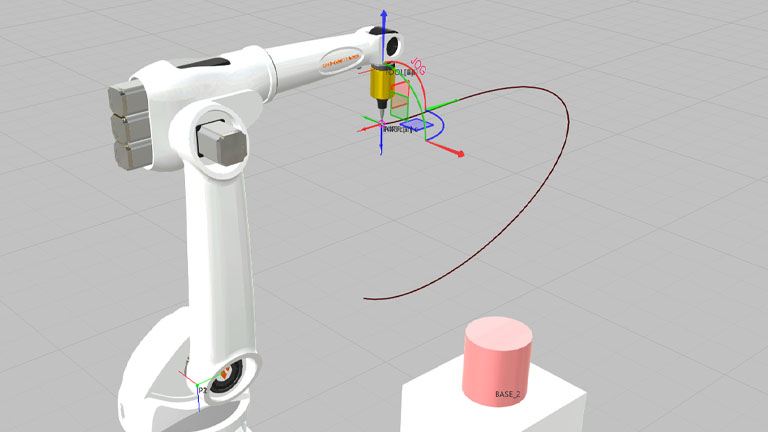
Die Robotersimulation kam in den 1980er Jahren auf. Dabei wurden CAD-Daten verwendet, um den Roboter, seine Bewegungen und die Arbeitszelle oder Umgebung darzustellen. Wenig später wurden Techniken zur Nachbearbeitung der Positionsinformationen aus dem CAD-Programm entwickelt, um ein Roboterbewegungsprogramm zu erstellen, ähnlich wie bei der Erstellung von Bearbeitungsbahnen für CNC-Maschinen). Daraus ist OLP entstanden.
Heute gibt es zwei Arten von OLP. Die meisten Roboterhersteller bieten ein Roboterprogrammierpaket zusätzlich zu einem Programmierhandgerät an. Alternativ kann sich ein Roboterbenutzer für ein OLP-Produkt von einer unabhängigen Quelle entscheiden. Dies hat den Vorteil, dass es unabhängig von der Marke des zu programmierenden Roboters ist.
Eine wirksame OLP hängt von der Genauigkeit des CAD-Modells gegenüber der Arbeitszelle ab. Um vollständig zu erfassen, wie die Zelle tatsächlich aufgebaut ist, und nicht nur, wie sie im CAD-Modell dargestellt ist, müssen die Anwender ein Verfahren durchführen, das als Kalibrierung der Roboterzelle bezeichnet wird. Dazu werden eine Reihe von Referenzpunkten in der Zelle gemessen und die tatsächliche Position des Werkzeugmittelpunkts (TCP) des Roboters sowie die Positionen der Peripheriegeräte in OLP eingelesen. In diesem werden anschließend spezielle Kalibrierungsprogramme ausgeführt, um die tatsächliche Übereinstimmung zwischen dem Modell und der realen Zelle zu erreichen – die Meisterung des digitalen Zwillings. Die Messungen können mit dem Roboter selbst als Messgerät oder mit einer externen Messausrüstung wie 3D-Laserscannern durchgeführt werden.
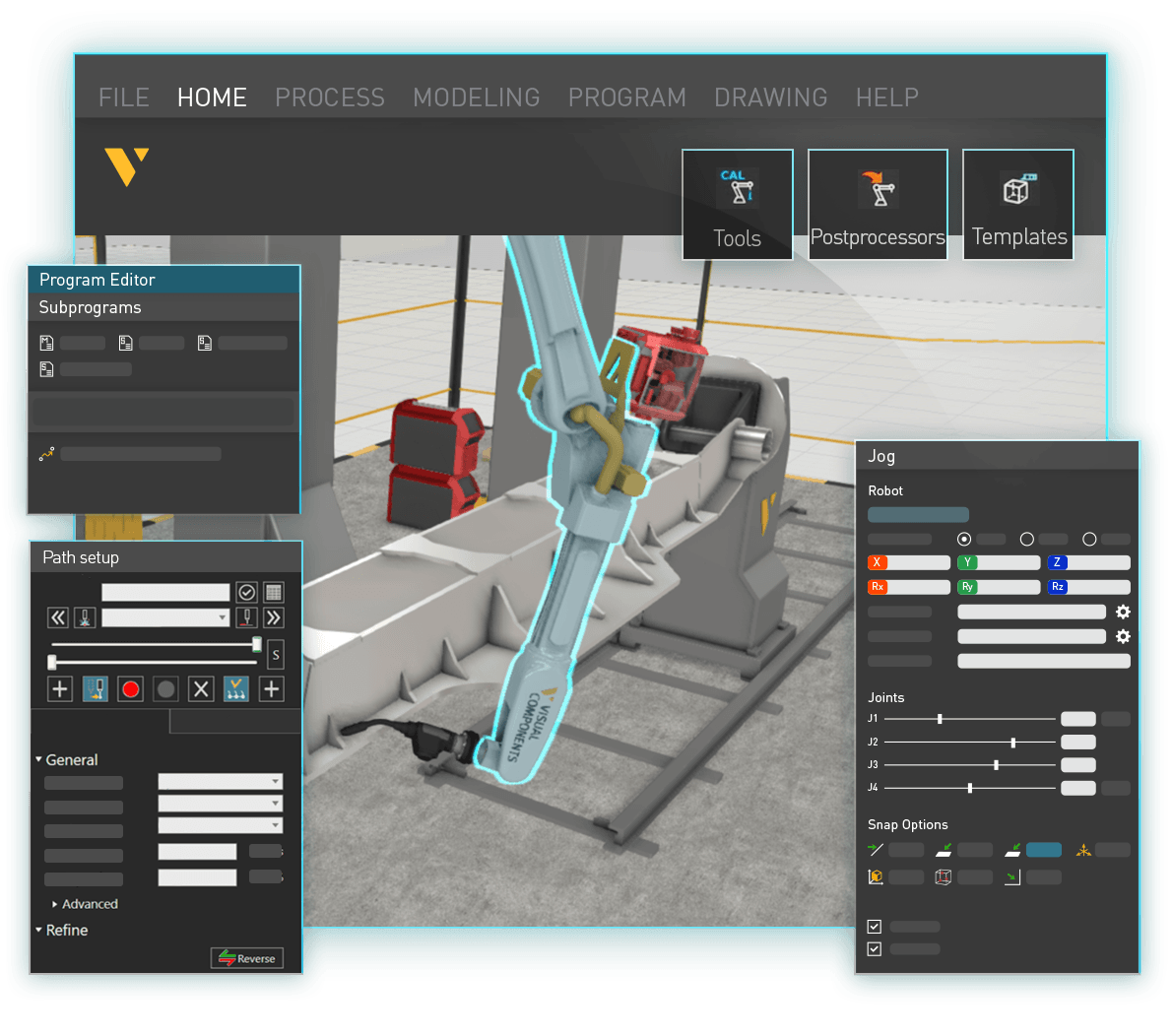
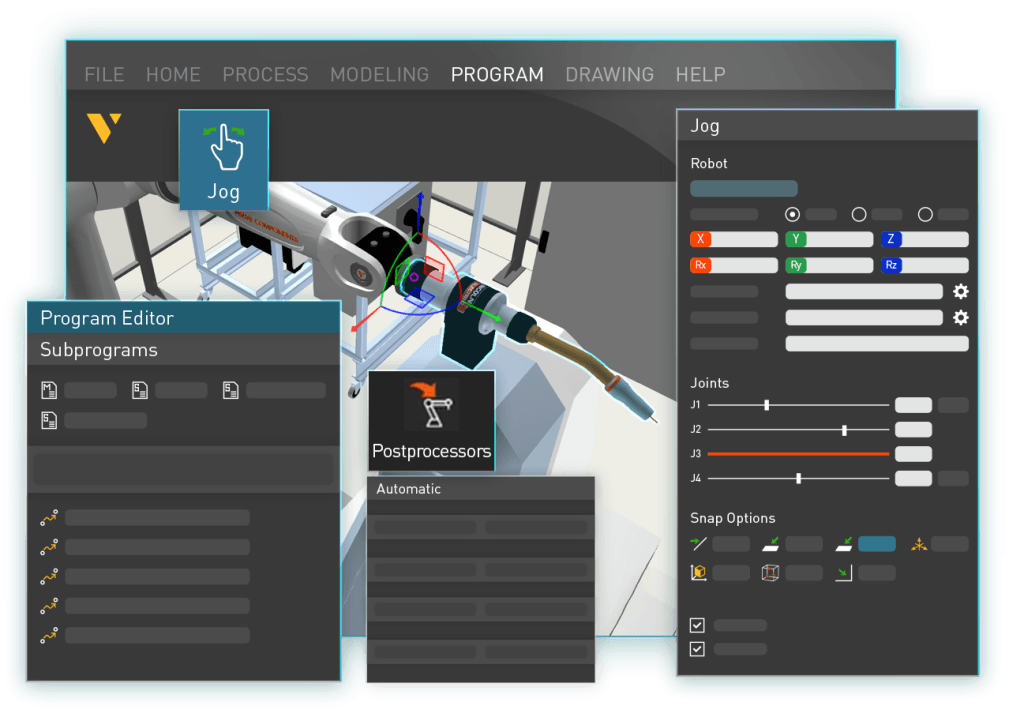
Roboterprogrammierung mit Visual Components
Die Roboterprogrammierung sollte nicht komplex, repetitiv oder zeitaufwändig sein. Die Software für die Roboterprogrammierung sollte die Flexibilität und Anpassungsfähigkeit der Produktion erhöhen und reproduzierbare Qualität mit großer Sorgfalt ermöglichen.
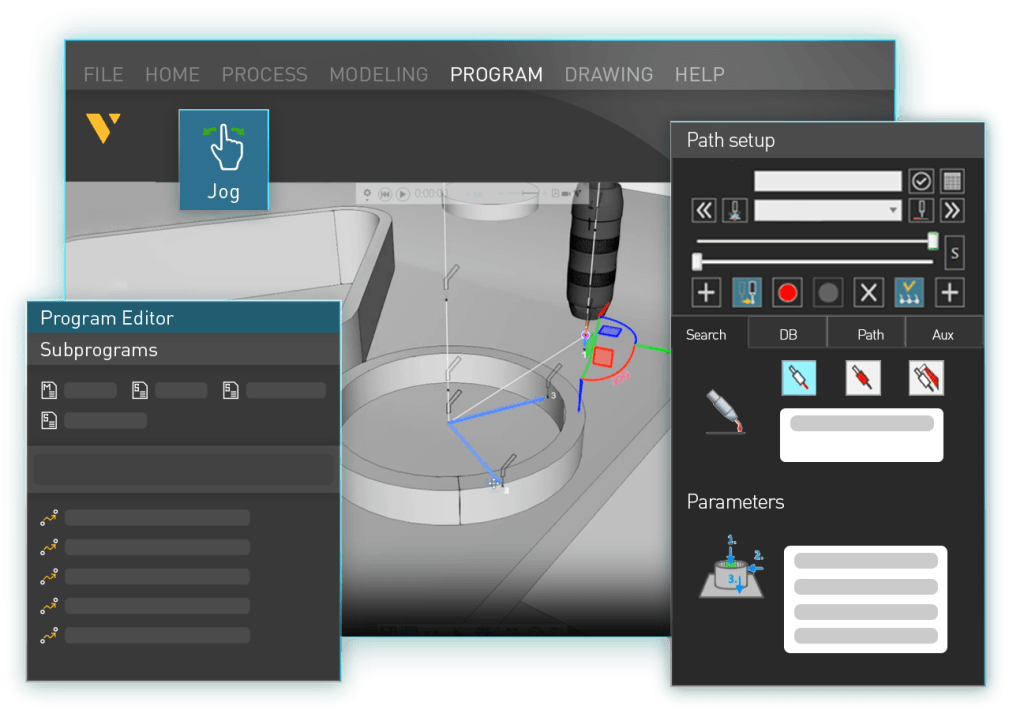
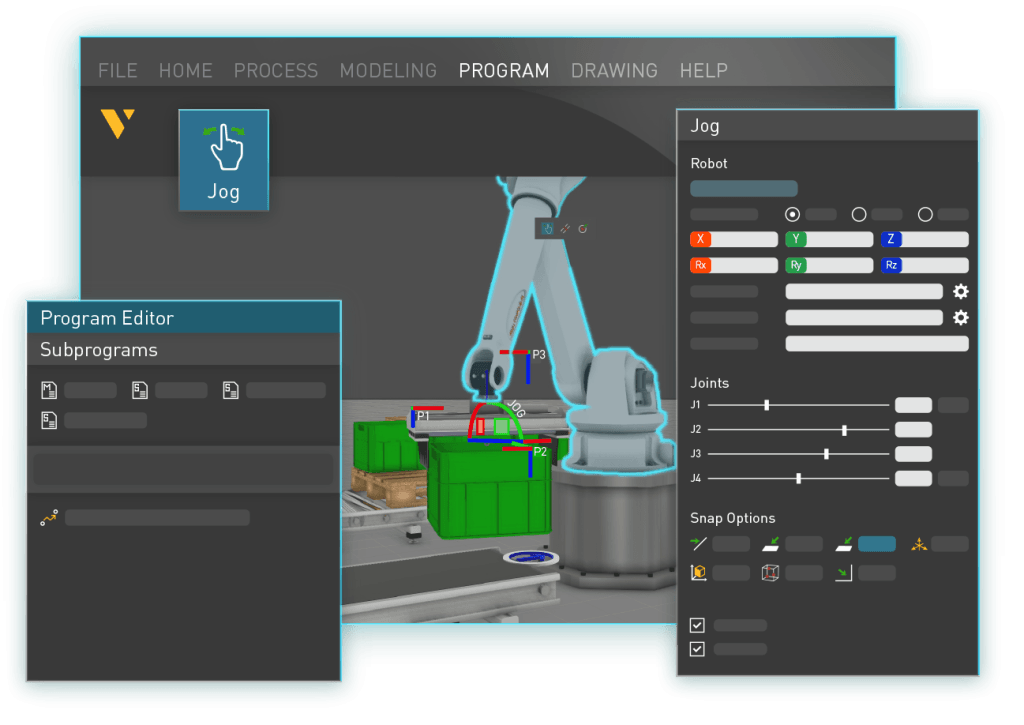
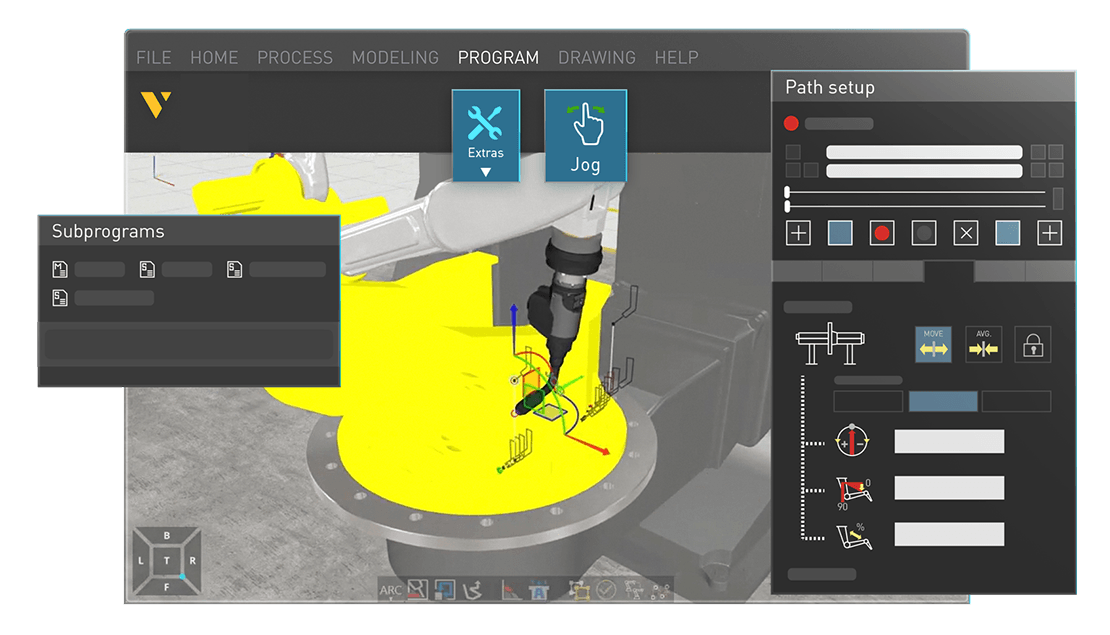
Visual Components bietet die schnellste und einfachste Offline-Programmiersoftware, die alle Arten der Automatisierung unterstützt. Von der Ein-Klick-Programmierung bis hin zur vollautomatischen modellbasierten Definition (MBD) ist sie mit allen gängigen Industrierobotermarken, -prozessen und -komplexitäten kompatibel.
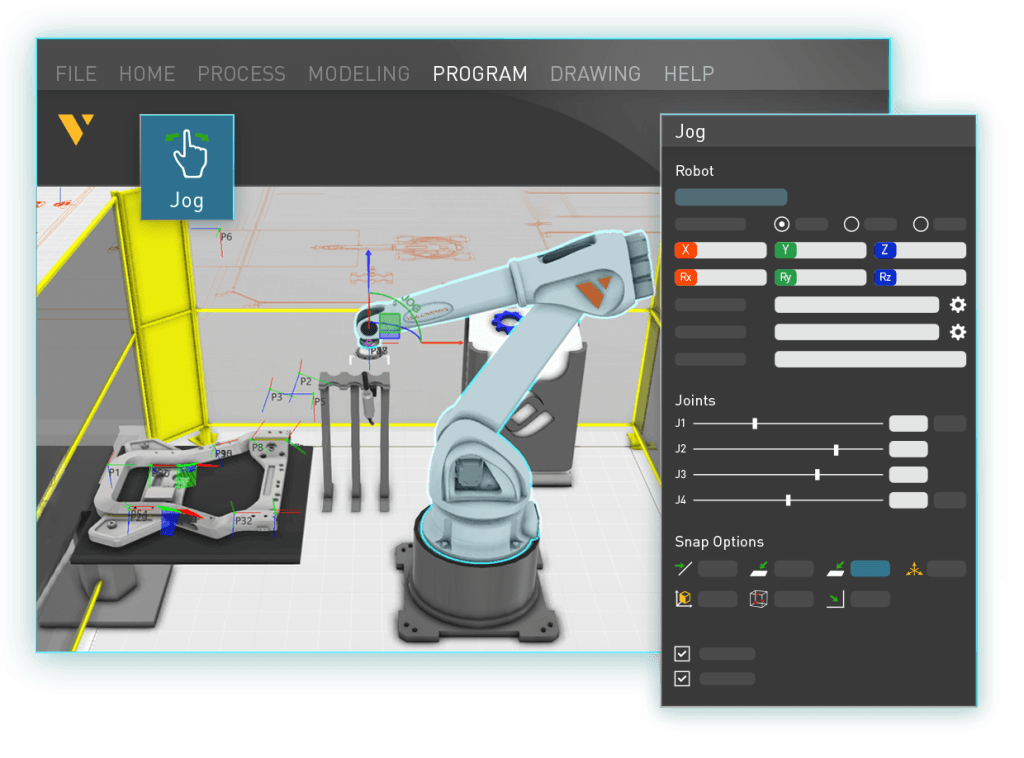
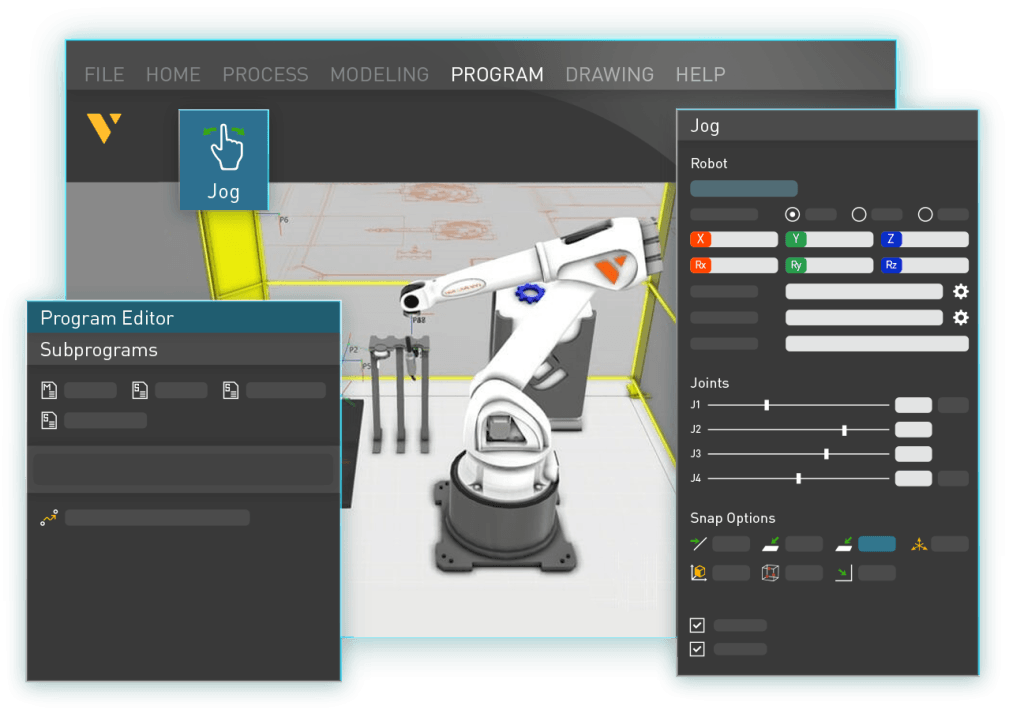
Wie funktioniert Roboter-Offline-Programmierung?
Optimiere die Planung und Inbetriebnahme deiner Roboterzelle mit einer schnellen, einfachen und genauen Offline-Programmierung des Roboters.
Optionen für die Roboterprogrammierung
Online-Programmierung
Vorteile:
- „Kostenlos“, keine Software-Investitionen erforderlich
Nachteile:
- Produktions- und Roboterstillstandszeiten
- Komplex und zeitaufwendig
- Spezielle Programmiersprache
- Qualitätsschwankungen
- Sicherheit und Zugänglichkeit
Die Offline-Programmierung löst viele der Herausforderungen, die mit der Programmierung über ein Teach Pendant verbunden sind. Sie verhindert Unterbrechungen der Produktion, ist bequem, sicher, schnell und mit verschiedenen Robotermarken kompatibel. Sie kann mit dem Produktdesign durch die Anwendung von CAD-Dateien beginnen und sorgt so für mehr Flexibilität und Effizienz.
Bildverarbeitungsgestützte Programmierung
Vorteile:
- Informationsaustausch in Echtzeit
- Keine Anforderungen an Position oder Befestigung
Nachteile:
- Roboterprogrammierung ist weiterhin erforderlich
- Ungenauigkeit und Unzuverlässigkeit in unkontrollierten Umgebungen
- Kann erst beginnen, nachdem einige Teile hergestellt sind
- Auf einfache Teile beschränkt
Die Offline-Programmierung bietet eine zuverlässigere und vielseitigere Lösung, die präzise und konsistente Ergebnisse liefert, ohne die Produktion zu unterbrechen. Sie ist nicht auf einfache Teile limitiert und kann bereits in der Produktdesignphase mit CAD-Dateien beginnen, was die Flexibilität und Effizienz erhöht.
Roboter-Offline-Programmierung
Vorteile:
- Keine Produktionsunterbrechung
- Praktisch, sicher und schnell
- OLP-Software von Drittanbietern unterstützt verschiedene Robotermarken und bietet so mehr Flexibilität
- Kann Produktdesign bereits mit CAD-Dateien beginnen
Nachteile:
- CAD-Datei erforderlich
- Herstellerspezifische OLP-Software unterstützt nur die eigenen Roboter, was die Kompatibilität einschränkt
Welche sind die besten OLP-Anwendungsfälle?
Zugang und Orientierung sind besondere Herausforderungen, bei denen OLP hilft, und komplexe Schweißraupen können eine große Anzahl von Punkten erfordern.
Anwendungen wie Glasperlenstrahlen und Entgraten erfordern oft lange, komplizierte Pfade, die eine Menge Punkte benötigen.
Wie beim Schweißen ist auch hier die Ausrichtung wichtig, ebenso wie eine einheitliche Farbdicke und ein gleichmäßiger Abstand, damit alle Bereiche optimal erreicht und lackiert werden können.
Greif- und Einschubbewegungen erfordern eine präzise Steuerung der Greiferausrichtung, die mit OLP auf einem höheren Niveau erreicht wird.
Plasma-, Laser- oder Wasserstrahlschneiden mag für Standardteile funktionieren, aber für komplexe Geometrien werden Roboter mit genauen Schnittmustern benötigt, die mithilfe von OLP erstellt werden können.
Viele Montagevorgänge erfordern das Aufbringen langer, komplexer Kleberaupen: OLP hilft dabei, die Werkzeugbahnen schnell und mit gleichbleibender Qualität offline zu erstellen.

Für Roboter-Programmierer
Spare Zeit bei der manuellen Roboterprogrammierung und Nachbearbeitung, damit du dich auf wichtigere Aufgaben konzentrieren kannst.
Für Fertigungsingenieure
Einfache Zusammenarbeit und Überprüfung der Durchführbarkeit von Design und Vorrichtungen in der Produktion.

Für Produktionsleiter
Spare 10x Programmierzeit, ohne die Produktion zu stoppen. Maximiere die Qualität, die Roboterauslastung und den Produktionsausstoß.

Für Manager in der Robotik
Maximiere Qualität, Roboterauslastung und Produktivität, um die Amortisationszeit der Roboterinvestition zu verkürzen.
Für Systemintegratoren
Erstelle ganz einfach einen digitalen Zwilling, um Angebote vor der Lieferung auf ihre Exaktheit hin zu optimieren. Bleib wettbewerbsfähig, indem du Qualität lieferst und Kundenzufriedenheit erreichst.
FAQ
Die Roboter-Offline-Programmierung (OLP) ist eine Methode zur Erstellung von Roboterprogrammen in einer Computersoftware (virtuelle Umgebung) auf der Grundlage von 3D-CAD-Daten. Sobald das Roboterprogramm in der Software erstellt und überprüft wurde, kann es auf den physischen Roboter übertragen werden.
Die Effektivität von OLP hängt davon ab, wie genau das CAD-Modell die Arbeitszelle darstellt. Um das reale Layout der Zelle zu erfassen und nicht nur das, was im CAD-Modell dargestellt ist, müssen die Benutzer einen Prozess durchführen, der als Kalibrierung der Roboterzelle bekannt ist. Dazu gehört Folgendes:
- Das Messen einer Reihe von Referenzpunkten innerhalb der Zelle.
- Aufzeichnung der tatsächlichen Position des Werkzeugmittelpunkts (TCP) des Roboters und der Positionen der Peripheriegeräte in OLP.
- Spezielle Kalibrierungsprogramme werden ausgeführt, um das Modell mit der tatsächlichen Zelle abzugleichen und den digitalen Zwilling zu perfektionieren.
Die Messungen können mit dem Roboter selbst oder mit externen Geräten wie 3D-Laserscannern durchgeführt werden.
Dies liegt an der Annahme, dass hohe Produktionsmengen erforderlich sind, um von OLP zu profitieren. Die Realität sieht etwas anders aus. OLP ist vor allem dann von Vorteil, wenn die Produktionsläufe kurz sind, häufig umgerüstet oder umgestellt wird und die Aufgaben sehr vielfältig sind. Kleine und mittelgroße Hersteller können sehr von OLP profitieren, wenn sie in kleinen Serien produzieren.
Wie jede Software erfordert auch OLP eine gewisse Einarbeitung und weist eine Lernkurve auf. Außerdem gibt es wahrscheinlich einige OLP-Produkte, die nicht besonders benutzerfreundlich sind. Die besten Produkte sind jedoch intuitiv, logisch und einfach zu bedienen, so dass auch Einsteiger schnell damit zurechtkommen. Unterschätze außerdem nicht die Komplexität der Programmierung mit dem Teach-Pendant für Roboter. Verschiedene Roboterhersteller haben unterschiedliche Befehle und außerdem können sich die Systeme von älteren zu neueren Robotermodellen ändern. Das macht es noch komplizierter, die manuelle Programmierung zu verwenden.
Eine OLP-Software ist eine zusätzliche Anschaffung. Sie muss jedoch nur einmal gekauft werden und kann alle Hersteller von Robotern unterstützen, die ein Betrieb einsetzt. (OLP- Nutzer berichten von einer verbesserten Kapitalrendite ihrer Roboterzellen, da die Ausfallzeiten reduziert und die Roboterauslastung erhöht werden. Es gibt Erkenntnisse, dass die programmierbedingten Ausfallzeiten der Roboter um bis zu 90 % gesenkt werden können und sich bereits bei einem einzigen Projekt bezahlt machen.
Nutzer der OLP-Software berichten über eine Reihe von Vorteilen:
Keine Roboterausfallzeiten
Die Programmierzeit kann um bis zu 80 % verkürzt und die Roboterauslastung um bis zu 95 % erhöht werden, was die Produktivität des Programmierers steigert und die Ausfallzeiten der Zelle verringert.
Schnellere Umrüstzeiten
Es wird weniger Zeit benötigt, um ein neues Produkt in die Produktion zu bringen – die Programmierung erfolgt gleichzeitig und nicht nacheinander.
Erhöhte Sicherheit am Arbeitsplatz
Geringeres Risiko von Unfällen und Verletzungen.
Höhere und reproduzierbare Qualität
Die Roboterprogramme sind besser optimiert (kürzere Zykluszeiten, höhere Genauigkeit und Konsistenz), was zu einer höheren und reproduzierbaren Produktionsqualität führt.
Unabhängig von Roboterhersteller und -prozess
Unabhängig von Robotermarken oder Prozesstypen kann die moderne OLP-Software alle Anwendungen abdecken.
Vermeide Nacharbeiten und Verzögerungen
Änderungen an Vorrichtungen und Werkzeugen in letzter Minute werden vermieden.
Die OLP-Software beschleunigt die Programmerstellung und reduziert den Zeitaufwand für die Programmierung, aber sie macht erfahrene Programmierer nicht überflüssig. Bahnplanung und -optimierung, Kollisionsvermeidung und so weiter werden am besten von einem erfahrenen Programmierer erledigt. Die OLP-Software kann sie jedoch produktiver machen und ihnen mehr Zeit für komplexere Programmieraufgaben und Innovationen in einer sichereren Arbeitsumgebung geben.
Ja, OLP kann die Roboterprogrammierung vor Ort reduzieren, indem es genaue Roboterprogramme erstellt, um Nachbesserungen zu minimieren. Die mit der OLP-Software von Visual Components erstellten Programme sind zum Beispiel fehlerfrei. In den meisten Fällen ist ein Nachbessern vor Ort gar nicht nötig, vorausgesetzt, es wird eine Art Nahtsuchfunktion verwendet.
OLP kann dabei helfen, häufige Roboterprobleme während der Programmausführung zu erkennen. Mit den Werkzeugen zur Kollisionserkennung und Pfadüberprüfung in der OLP-Software von Visual Components kannst du zum Beispiel Erreichbarkeits-, Gelenkgrenzen-, Singularitäts- und Kollisionsprobleme einfach und effizient von deinem Arbeitsplatz aus beheben.
Wenn du eine OLP-Software in Erwägung ziehst, solltest du prüfen, ob die Software alle Roboterhersteller, -prozesse und -komplexitäten für deinen aktuellen und zukünftigen Bedarf abdeckt. Nachdem du die technischen Möglichkeiten bewertet hast, ist es auch wichtig zu prüfen, ob du die technische Unterstützung erhältst, die du für eine erfolgreiche Implementierung und Inbetriebnahme brauchst. Schließlich solltest du eine Demo anfordern, um die Software selbst zu testen.
Wie nutzen unsere Kunden Visual Components für die Roboterprogrammierung?
Maximaler Wirkungsgrad und ROI ab dem ersten Tag: Duun Industrier vorprogrammiert eine Schweißroboterzelle mit Visual Components OLP
Duun Industrier, ein führender norwegischer Hersteller von Schwermaschinen, installierte 2013 die größte Roboterschweißstation in den nordischen Ländern. Seit 2014 wird Visual Components für die Roboterprogrammierung eingesetzt und 2024 wurde eine…
Kampf gegen den Mangel an Schweißern: Wie AMI Attachments die Produktionsleistung mit Visual Components OLP steigert
AMI Attachments, ein führender nordamerikanischer Hersteller von Anbaugeräten für schwere Maschinen, wollte den Produktdurchsatz verbessern und die sich verändernden Marktanforderungen erfüllen, während gleichzeitig ein Mangel an Schweißern herrschte. Durch die…
Komplexe Schweißarbeiten meistern: Wie Bunorm Maschinenbau die Qualität und Effizienz mit Visual Components OLP gesteigert hat
Bunorm Maschinenbau, ein Spezialanbieter in der Maschinenindustrie, ist bestrebt, seine Infrastruktur auf einem hohen Niveau zu modernisieren und flexibel zu gestalten. Mit ihren weitreichenden Möglichkeiten steht die Steigerung der Produktionseffizienz…
Wie sieht die Zukunft der Roboterprogrammierung aus?
Die Zukunft der Roboterprogrammierung wird von mehreren wichtigen Entwicklungen geprägt, die die Automatisierung, Effizienz und Zusammenarbeit verbessern. Diese Entwicklung markiert einen bedeutenden Wandel – weg von manuellen und isolierten Prozessen hin zu stärker integrierten und intelligenteren Systemen.
Diese Fortschritte in der Automatisierung und KI werden die Effizienz erheblich steigern. KI wird eine entscheidende Rolle dabei spielen, Roboterprogrammierer zu unterstützen, Roboterprogramme effizienter zu erstellen und optimieren.
Dies fördert die Zusammenarbeit zwischen verschiedenen Teams und stellt sicher, dass die Roboterprogrammierung mit den allgemeinen Zielen für Design und Fertigung im Einklang steht. CAD-Modelle können von Anfang an Schweißmodelle enthalten, wodurch der gesamte Prozess optimiert wird.
Meistere die Roboterprogrammierung in Visual Components
Einführung in Robotics OLP
Ein Überblick über die verschiedenen Roboterprozesse in Visual Components Robotics OLP, vom Schweißen über die Bearbeitung bis hin zum Lackieren.
Einführung in das Anlernen von Robotern
Erfahre, wie du einen Knickarmroboter verwendest, z. B. Roboter austauschen, Programme testen, einen Sauggreifer hinzufügen und Signale für die Teilemanipulation konfigurieren.
Grundlagen der Robotik
Ein Überblick über die Robotik in Visual Components und umfasst Themen wie Punkt-zu-Punkt-Bewegungen, lineare Bewegungen, Robotergrundrahmen, Roboterwerkzeugrahmen, Roboterkonfigurationen und Roboterdrehungen.