Der komplette Leitfaden zur ABB-Roboterprogrammierung und Offline-Programmierung
Meistere die ABB-Roboterprogrammierung mit Offline-Programmierung (OLP). Dieser umfassende Leitfaden zeigt dir, wie du MultiMove-Zellen für synchronisiertes Schweißen effizient programmierst, den OLP-Workflow optimierst und die passende Software für deine Produktion auswählst: ABB RobotStudio oder Visual Components.
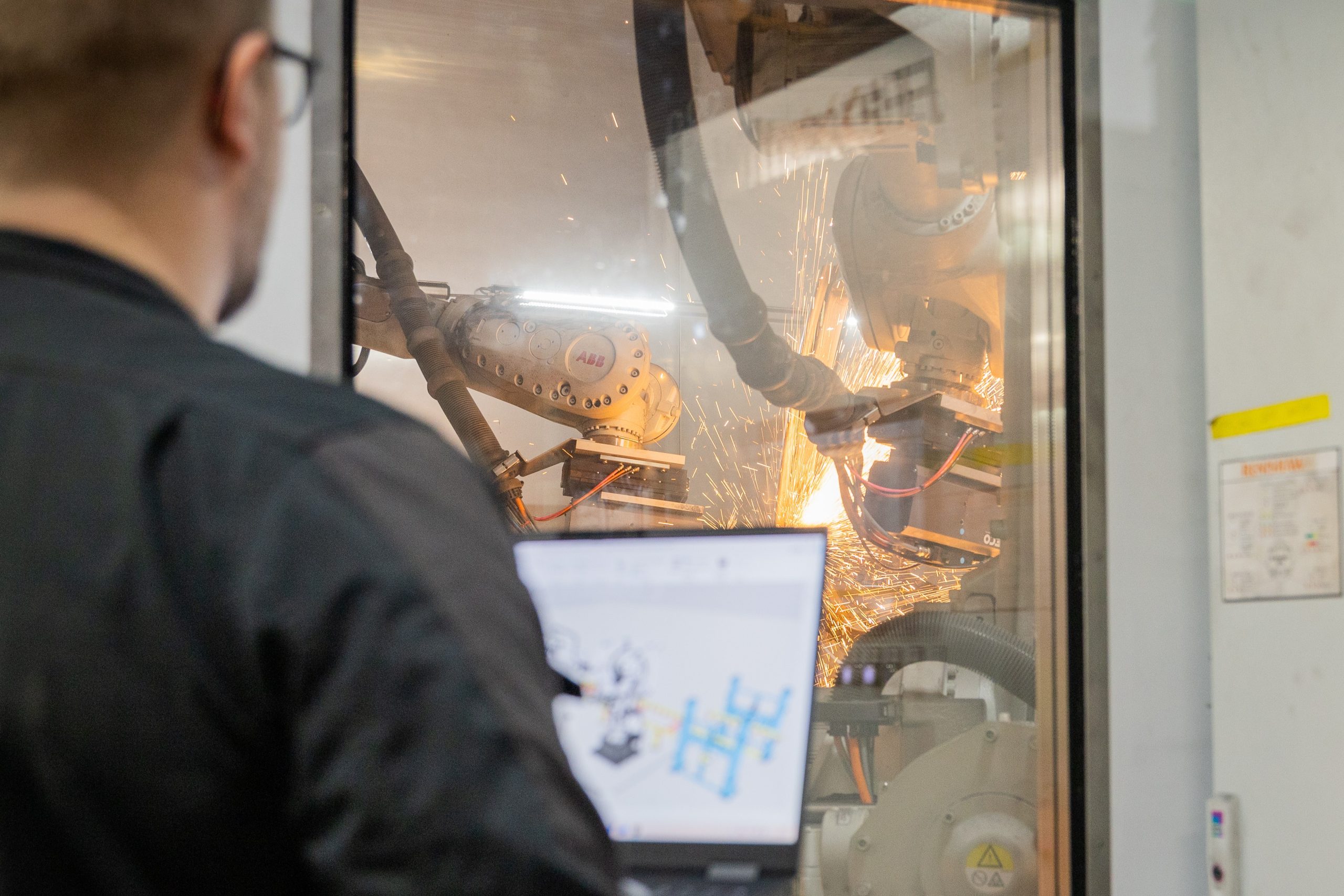
ABB-Roboter kommen in einigen der anspruchsvollsten Fertigungsprozesse der Welt zum Einsatz, von Hochgeschwindigkeitsschweißen bis hin zu Präzisionsmontage. Die Programmierung dieser Roboter war jedoch schon immer eine der größten Bremsfaktoren.
Die Programmiersprache RAPID, die IRB-Baureihe, MultiMove zur Koordination mehrerer Roboter über eine Steuerung. Das alles bildet ein leistungsfähiges Ökosystem. Doch die klassische Programmierung vor Ort bindet Roboter und Produktionszeit. Genau hier verlieren viele Teams Wochen, die sie nicht verlieren müssten.
Die Offline-Programmierung (OLP) löst dieses Problem. Du erstellst Roboterprogramme in einer virtuellen Umgebung, testest sie und überträgst sie anschließend auf den physischen Roboter. Während du den nächsten Auftrag programmierst, läuft die Produktion weiter.
Dieser Leitfaden behandelt die Grundlagen der ABB-Roboterprogrammierung, den OLP-Workflow, synchronisiertes Schweißen mit MultiMove und die Auswahl des passenden Programmierwerkzeugs.
ABB-Roboter: Modelle, Steuerungen und worauf es bei der Offline-Programmierung ankommt
Auf einen Blick: ABBs IRB-Baureihe umfasst Dutzende Modelle mit Traglasten von 3 kg bis 800 kg. Die Steuerungen OmniCore und IRC5 unterstützen weltweit mehr als 500 Roboteranwendungen.
Die IRB-Baureihe von ABB ist breit aufgestellt. Der IRB 1600 und der IRB 2600 übernehmen einen Großteil der Aufgaben beim Lichtbogenschweißen und im Materialhandling. Der IRB 6700 ist für höhere Traglasten in anspruchsvolleren Umgebungen ausgelegt. Unterschiedliche Achskonfigurationen, Reichweiten und Tragfähigkeiten – all das spielt eine Rolle, wenn du eine Umgebung für die Offline-Programmierung einrichtest.
Die Steuerung ist genauso entscheidend wie der Roboter selbst. OmniCore ist ABBs neueste Steuerungsgeneration mit schnellerer Verarbeitung, verbesserter Bewegungssteuerung und breiterer Konnektivität. IRC5 ist in bestehenden Installationen nach wie vor weit verbreitet. Dein OLP-Werkzeug muss die jeweilige Steuerung unterstützen. Andernfalls passen die virtuell erzeugten Programme nicht zu dem, was später in der realen Produktion passiert.
ABB-Roboter werden mit RAPID programmiert, der proprietären Programmiersprache von ABB. Egal, ob du online oder offline programmierst: Das Ergebnis muss gültiger RAPID-Code sein, den die Steuerung ausführen kann. Genau hier wird die Wahl der OLP-Software besonders wichtig.
Was ist Offline-Programmierung und warum lohnt sie sich für ABB-Roboter?

Der Nutzen: bis zu 80 % weniger Programmieraufwand, keine Produktionsstillstände während der Programmerstellung und Kollisionen, die virtuell statt erst an der realen Anlage erkannt werden.
Bei der Offline-Programmierung werden Roboterprogramme in einer virtuellen Umgebung erstellt, ohne die Produktion zu unterbrechen. Statt Punkte manuell auf dem Shopfloor einzulernen, erstellst du das Programm am Schreibtisch, simulierst es und überträgst es anschließend auf den physischen Roboter.
So sieht ein typischer ABB-OLP-Workflow aus: Du importierst CAD-Modelle, erstellst die virtuelle Roboterzelle, programmierst Bewegungsbahnen, prüfst auf Kollisionen, verifizierst die Zykluszeiten und exportierst produktionsreifen Code.
Was du konkret davon hast:
- Die Programmierzeit sinkt im Vergleich zur Programmierung mit dem Teachpendant um bis zu 80 % (basierend auf Kundendaten von Visual Components)
- Zur Inbetriebnahme bringst du bereits validierte Programme mit, die sofort einsatzbereit sind, statt mehrere Tage vor Ort mit der Fehlersuche zu verbringen
- Kollisionen, Singularitäten und Bahnfehler werden erkannt, bevor sie auf dem Shopfloor zum Problem werden
- Du kannst den nächsten Auftrag programmieren, während der aktuelle noch läuft
Wenn du komplette Roboterzellen vor der Übergabe digital validieren willst, ist OLP der richtige Weg.
ABB MultiMove und synchronisiertes Schweißen

Mit MultiMove lassen sich bei ABB mehrere Roboter über eine einzige Steuerung mit vollständig koordinierten Bewegungen steuern. Der häufigste Anwendungsfall ist das synchronisierte Schweißen, bei dem ein Roboter schweißt, während ein anderer das Werkstück hält oder neu positioniert. Auch für die Montage mit mehreren Robotern und für koordinierte Materialhandhabung eignet sich MultiMove.
Die Programmierung einer MultiMove-Zelle folgt in der Regel diesem Ablauf:
- Definiere die Roboterzelle und die Werkstückgeometrie
- Programmiere koordinierte Bewegungsbahnen für jeden Roboter
- Synchronisiere Zeitabläufe und Bewegungsgrenzen zwischen den Robotern
- Simuliere den Ablauf und validiere einen kollisionsfreien Betrieb
- Übertrage das Programm auf die physische Zelle
Auf dem Papier wirkt dieser Ablauf klar strukturiert, in der Praxis ist er deutlich komplexer. Die zeitliche Abstimmung zwischen mehreren Robotern ohne Kollisionen erfordert hohe Präzision. Enge Arbeitsräume erschweren die Prüfung von Abständen und Freiräumen. Und ohne Simulationsumgebung bedeutet die Fehlersuche bei Synchronisationsproblemen schnell teures Trial-and-Error auf dem Shopfloor.
Ein paar Punkte, auf die du achten solltest:
- Simuliere vor der Inbetriebnahme. MultiMove-Programme sind zu komplex, um sie ausschließlich an der physischen Zelle zu debuggen.
- Führe die Kollisionserkennung früh durch. Prüfe Abstände und Freiräume in der virtuellen Umgebung, bevor du Zeit in die Feinabstimmung der Bewegungsbahnen investierst.
- Starte grob und verfeinere dann schrittweise. Bringe zuerst das Timing mit grob definierten Bewegungsbahnen in Einklang und optimiere anschließend auf Zykluszeit und Schweißqualität.
- Nutze die Synchronisierungsfunktionen deines OLP-Werkzeugs. Mehrere Roboter manuell zu koordinieren, ist zeitaufwendig. Die Software ist genau dafür da, diesen Prozess effizienter zu machen.
Unterstützung für MultiMove in Visual Components
Visual Components OLP unterstützt MultiMove-Konfigurationen vollständig. Alle Funktionen stehen zur Verfügung, darunter koordinierte Bewegungen, unabhängige Bewegungen, Ereignissynchronisierung und Aufgabenkoordination. Im Vergleich zu nativen ABB-Werkzeugen gibt es keine Einschränkungen. Das bedeutet, dass du auch komplexe Mehrroboterzellen vollständig offline programmieren und mit der Sicherheit übertragen kannst, dass die Synchronisationslogik wie vorgesehen funktioniert.
Die Wahl des richtigen OLP-Werkzeugs: ABB RobotStudio oder Visual Components OLP
Welche Lösung besser passt, hängt davon ab, wie dein Shopfloor aufgestellt ist.
ABB RobotStudio ist ABBs eigene Umgebung für die Offline-Programmierung. Sie bietet eine tiefe Integration mit ABB-Steuerungen, eine präzise Generierung von RAPID-Code und Zugriff auf ABB-spezifische Technologiepakete. Wenn in deinem Betrieb ausschließlich ABB-Roboter eingesetzt werden und deine Ingenieure bereits mit RAPID vertraut sind, ist RobotStudio eine solide, speziell dafür entwickelte Lösung.
In der Praxis stoßen viele Ingenieure mit RobotStudio jedoch auch an Grenzen. Das Erstellen von Schweißprogrammen kann umständlich sein, und Schweißzellen sauber einzulernen, ist oft schwierig. Hinzu kommt, dass RobotStudio verschiedene Prozesse einzeln bündelt und als Add-ons anbietet. Für Schweißen, Lackieren oder andere Anwendungen müssen daher unter Umständen separate Pakete erworben werden. Und wenn dein Unternehmen mit mehreren Robotermarken arbeitet, musst du statt eines einheitlichen Workflows mit mehreren markenspezifischen OLP-Werkzeugen parallel arbeiten.
Visual Components OLP ist eine universell kompatible OLP-Plattform, die genau diese Schwachstellen adressiert. Dank integrierter Postprozessoren unterstützt sie 22 Robotermarken und mehr als 40 Steuerungen und eignet sich damit auch für Produktionsumgebungen mit unterschiedlichen Robotermarken. Eine Lizenz umfasst alle wichtigen industriellen Prozesse, zusätzliche Add-ons sind nicht erforderlich. Die Postprozessoren übersetzen dein Roboterprogramm mit 100 % Genauigkeit in die jeweilige Robotersprache. So entspricht der erzeugte RAPID-Code dem, was auch ein erfahrener ABB-Programmierer schreiben würde, und menschliche Fehler werden vermieden. Über Python lassen sich die Postprozessoren zudem anpassen, sodass Kunden die Ausgabe auf eigens entwickelte Funktionen in ihren Anwendungen abstimmen können. Wenn du einen ABB-Roboter in derselben Zelle mit einem KUKA- oder Fanuc-Roboter synchronisieren musst, lässt sich auch das in Visual Components OLP innerhalb derselben Plattform umsetzen.
Der Workflow von der Simulation bis zur Robotersteuerung
Die Übertragung von Programmen aus Visual Components OLP auf eine ABB-Steuerung folgt einem klaren Ablauf. Du kannst Programme entweder per USB-Stick übertragen oder über eine direkte FTP-Verbindung Programmdateien direkt aus Visual Components auf der Robotersteuerung speichern. Das entspricht einem ähnlichen Workflow wie in ABB RobotStudio, wo Dateien ebenfalls automatisch auf die Steuerung übertragen werden können.
Der entscheidende Unterschied ist, dass Visual Components OLP diese Möglichkeit für alle unterstützten Robotermarken bietet, nicht nur für ABB. Eine einzige Plattform, unabhängig davon, welche Roboter in deiner Zelle im Einsatz sind.
Was dir Visual Components OLP bietet:
- Ein Werkzeug für all deine Roboter, unabhängig vom Hersteller
- Bis zu 10-mal schnellere Programmerstellung als mit herkömmlichen OLP-Werkzeugen
- Schweißausrüstung validieren, bevor du investierst
- Machbarkeitsprüfung neuer Produkte auf bestehenden Zellen
- Weniger Produktionsstillstände während der Programmierung
- Transparenz über die Zykluszeit schon vor dem Start
- Anlagen und Ausrüstung vor dem Kauf testen
- Komplexe Bewegungen mit intuitiven Funktionen zum Verfahren und Positionieren programmieren
Hier im direkten Vergleich:
| Funktion | ABB RobotStudio | Visual Components |
| Native RAPID-Unterstützung für ABB | Direkte ABB-Integration | Über den Postprozessor (100 % genau, anpassbar) |
| Unterstützung mehrerer Robotermarken | Nur ABB | 22 Marken, mehr als 40 Steuerungen |
| Synchronisierung mehrerer Roboter | MultiMove | Beliebige Markenkombination |
| Programmierung mit einem Klick | Nein | Ja |
| Programmierung von Schweißzellen | Eingeschränkte Werkzeuge | Vollständige Workflow-Unterstützung |
| Prozessabdeckung | Als separate Add-ons erhältlich | Alle wichtigen Prozesse enthalten |
Wenn du eine reine ABB-Zelle betreibst und keine markenübergreifende Koordination benötigst, ist RobotStudio eine passende Lösung. Wenn du dagegen mit unterschiedlichen Robotermarken arbeitest, mehrere Roboter markenübergreifend koordinieren musst, Programme schneller erstellen willst oder ein einziges Werkzeug für all deine Roboter suchst, bietet dir Visual Components OLP die nötige Flexibilität.
Zykluszeitgenauigkeit: Wo die Grenzen liegen
Die Vorhersage von Zykluszeiten ist ein Bereich, in dem OLP-Werkzeuge grundsätzlich an Grenzen stoßen. Visual Components verwendet zur Abschätzung der Zykluszeiten eine generische Robotersteuerung, daher bleibt das Ergebnis immer eine Näherung. Da jede Robotermarke ihre eigenen Grundlagen für die Bewegungsberechnung hat, sind Abweichungen unvermeidbar. Für die Planung sind diese Schätzungen sehr hilfreich, an die Genauigkeit des virtuellen ABB-Controllers in RobotStudio reichen sie jedoch nicht heran.
Für die meisten Anwendungen spielt diese Einschränkung in der Praxis keine entscheidende Rolle. In typischen Mehrroboter-Schweißprozessen bringt eine Zykluszeitschätzung im Millisekunden- bis Sekundenbereich kaum einen relevanten Mehrwert. Schweißprogramme laufen aufgrund der Prozessgeschwindigkeit und der Abkühlzeiten oft über Stunden, sodass die Abweichungen prozentual nur gering ins Gewicht fallen. Die größten Unterschiede zeigen sich eher bei punktbasierten Prozessen in Produktionslinien, etwa im Handling oder beim Punktschweißen, wo exaktes Timing wichtiger ist.
Wenn du eine präzise Validierung der Zykluszeit brauchst, bietet Visual Components eine Robot-Connectivity-Funktion, die sich mit RobotStudio und anderen markenspezifischen Werkzeugen verbinden lässt. So kann der virtuelle Roboter-Controller aus RobotStudio das in Visual Components erstellte Programm ausführen, sodass du Zykluszeiten mit markenspezifischer Genauigkeit vergleichen kannst. Diese Funktion ist verfügbar, wird in OLP-Workflows jedoch nur selten genutzt. Für die meisten Teams reichen die integrierten Schätzungen aus.
Best Practices für die Offline-Programmierung von ABB-Robotern

Ein paar Punkte, die in der Praxis oft darüber entscheiden, ob die Inbetriebnahme reibungslos läuft oder frustrierend wird:
Kalibrierung: die Grundlage für Genauigkeit
Die Effektivität von OLP hängt davon ab, wie präzise dein 3D-Simulationsmodell die reale Roboterzelle abbildet. Dabei geht es nicht nur um die CAD-Geometrie, sondern um den tatsächlichen physischen Aufbau. Genau deshalb ist die Kalibrierung so entscheidend.
Beim Kalibrierungsprozess wird der Roboter selbst genutzt, um die Umgebung und die externen Achsen in der Roboterzelle zu vermessen. Anschließend werden die Komponenten in den Simulationslayouts auf Basis dieser Messdaten positioniert und mit Informationen aus dem Roboter-Backup abgeglichen. Auf diese Weise entstehen hochpräzise Layoutmodelle, in denen die Positionen externer Achsen exakt definiert sind. Die daraus resultierenden Roboterprogramme und MultiMove-Synchronisationsprogramme erreichen die Genauigkeit, die für den Einsatz in der Produktion erforderlich ist.
Visual Components bietet erweiterte OLP-Kalibrierungswerkzeuge für die eigenständige Inbetriebnahme von Roboterzellen. Für Teams, die neu mit OLP arbeiten oder noch keine Erfahrung mit der Inbetriebnahme haben, steht zusätzlich eine von Experten geführte Kalibrierungsunterstützung zur Verfügung, um von Anfang an einen präzisen Aufbau sicherzustellen. Diese Unterstützung hilft dabei, saubere Kalibrierungsabläufe zu etablieren, die Teams in zukünftigen Projekten anschließend selbstständig anwenden können. Je nach Komplexität der Zelle dauern die erste Umsetzung und Kalibrierung in der Regel vier bis acht Arbeitstage.
Weitere Best Practices
Beginne mit grob definierten Bewegungsbahnen, um den grundsätzlichen Ablauf festzulegen, und optimiere erst danach die Zykluszeit. Alles direkt im ersten Durchgang perfektionieren zu wollen, kostet in der Regel nur unnötig Zeit. Plane daher von Anfang an mit Iterationen und einer schrittweisen Verbesserung.
Führe vor jeder Inbetriebnahme eine Kollisionserkennung und Zykluszeitanalyse durch. Das sollte ein fester Bestandteil deines Workflows sein und nicht nur dann passieren, wenn du bereits Probleme vermutest.
Häufige Fehler in der Praxis
- Kalibrierung überspringen. Das führt zu Abweichungen zwischen virtuellem und realem Roboter und lässt sich im Nachhinein meist nur mit großem Aufwand beheben.
- Die ersten Programme unnötig kompliziert machen. Starte einfach, validiere und optimiere erst danach.
- Technologiepakete ignorieren. Stelle sicher, dass dein OLP-Werkzeug die ABB-Technologiepakete unterstützt, die du brauchst, egal ob für Schweißen, Lackieren oder Dosieren.
Beispiele aus der Praxis
Zwei Unternehmen zeigen, wie ABB MultiMove OLP in der Praxis aussieht – in unterschiedlichen Größenordnungen und für verschiedene Anwendungen.
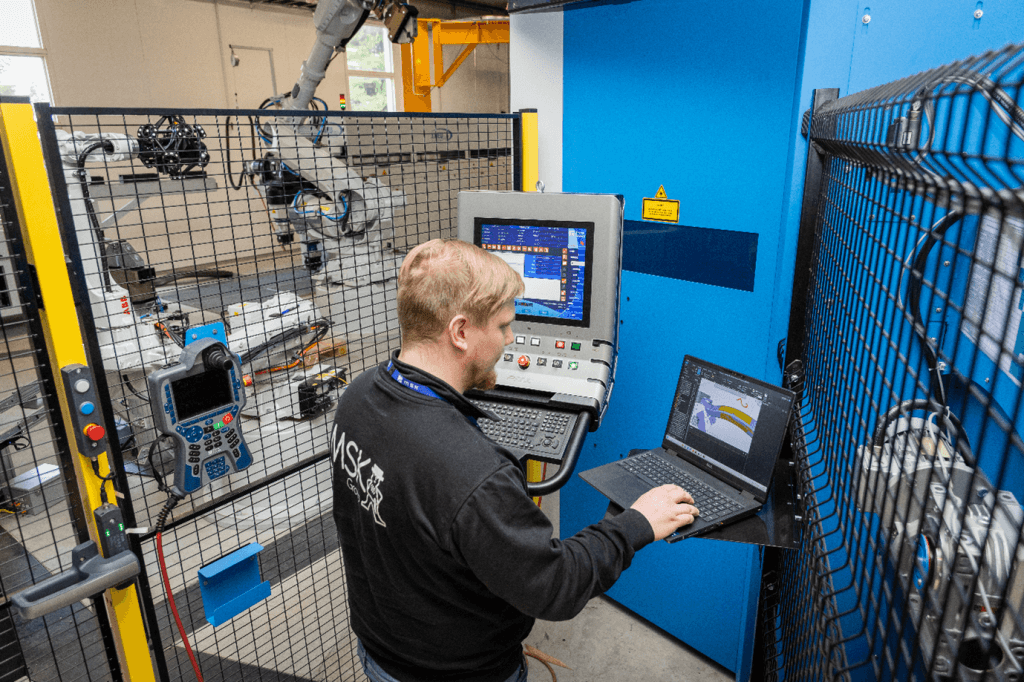
MSK Finland programmiert mit Visual Components OLP ABB-MultiMove-Anwendungen sowie ABB-Roboterzellen für Schweiß- und Schleifprozesse. Ihre Jucat-Modulschweißzelle arbeitet mit drei Robotern, die über eine Steuerung geführt werden. Dabei dient ein Spannvorrichtungsroboter als Werkstückpositionierer für zwei Schweißroboter. Eine weitere Jucat-Schweißzelle für Rahmen nutzt zwei Roboter, zwei Werkstückpositionierer und eine Bodenfahrbahn, ebenfalls gesteuert über eine einzige Steuerung. Darüber hinaus betreibt MSK Finland eine Schleifzelle mit zwei ABB-Robotern auf separaten Steuerungen. Alle drei Zellen wurden konzipiert und vollständig offline programmiert, bevor die realen Zellen aufgebaut wurden.
Lies die vollständige Erfolgsstory von MSK Finland →
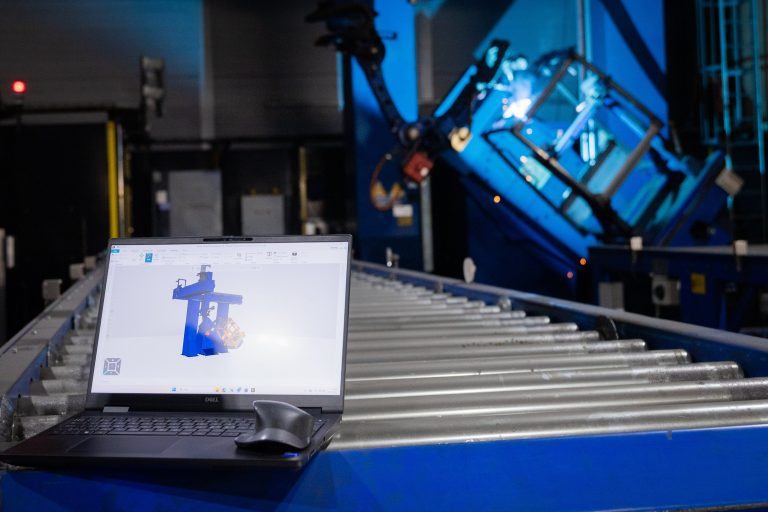
Volvo Construction Equipment setzt Visual Components OLP ein, um vorrichtungslose Schweißzellen in mehreren Werken weltweit zu programmieren, darunter auch ein ABB-MultiMove-Robotersystem. Die ABB-Zelle arbeitet mit drei Robotern, zwei Werkstückpositionierern und einem Positioniertisch, die über eine Steuerung geführt und vollständig synchronisiert werden. Derselbe OLP-Workflow lässt sich auf die globalen Produktionsstandorte übertragen und hilft dem Unternehmen, die Programmierung über verschiedene Standorte und Roboterkonfigurationen hinweg zu standardisieren.
Lies die Erfolgsstory von Volvo Construction Equipment →
Fazit
OLP ist der Weg, um nicht länger Wochen mit der Roboterprogrammierung vor Ort zu verlieren. Sie reduziert Stillstandszeiten, erhöht die Genauigkeit und macht synchronisiertes Schweißen mit MultiMove zu etwas, das du realistisch planen und validieren kannst, bevor es auf dem Shopfloor umgesetzt wird.
Ob RobotStudio oder Visual Components, der Ansatz bleibt derselbe: simulieren, validieren, umsetzen. Entscheide dich für die Lösung, die am besten zu deinem Shopfloor passt.
Häufig gestellte Fragen
Ja. Sowohl ABB RobotStudio als auch Visual Components OLP unterstützen die Offline-Programmierung von MultiMove-Konfigurationen. Visual Components OLP bietet dabei den vollen Funktionsumfang. Alle MultiMove-Funktionen, darunter koordinierte Bewegungen, unabhängige Bewegungen, Ereignissynchronisierung und Aufgabenkoordination, stehen ohne Einschränkungen zur Verfügung.
Roboterprogramme werden in einer virtuellen Umgebung erstellt und getestet. Kollisionen, Timing-Probleme und Bahnfehler werden erkannt, bevor sie den Shopfloor erreichen. Das verkürzt die Inbetriebnahme und reduziert Produktionsstillstände.
Das hängt von deinem Setup ab. RobotStudio ist eine starke Lösung für reine ABB-Zellen mit tiefer RAPID-Integration. Visual Components OLP ist besser geeignet für Roboterzellen mit unterschiedlichen Marken oder wenn du Roboter verschiedener Hersteller in einem einzigen Workflow synchronisieren musst. Beide Werkzeuge unterstützen die MultiMove-Funktionalität vollständig.
Du importierst CAD-Modelle, baust die virtuelle Roboterzelle auf, programmierst Bewegungsbahnen, simulierst und validierst den Ablauf, exportierst das Programm und überträgst es anschließend per USB oder FTP auf den physischen Roboter.
Zu den typischen Herausforderungen gehören die zeitliche Koordination mehrerer Roboter, das Vermeiden von Kollisionen in engen Arbeitsräumen und die Sicherstellung, dass das virtuelle Programm mit dem Verhalten in der realen Zelle übereinstimmt. Simulation und eine saubere Kalibrierung helfen dabei, diese Herausforderungen zu bewältigen.
Ja. Visual Components OLP verfügt über integrierte ABB-Postprozessoren, die deine Programme in 100 % genauen RAPID-Code übersetzen. Die Postprozessoren lassen sich über eine Python-Schnittstelle anpassen, sodass du die Ausgabe auf kundenspezifisch entwickelte Funktionen abstimmen kannst. Eine Lizenz deckt alle wichtigen industriellen Prozesse ab, darunter Schweißen, Lackieren und Dosieren, ohne dass separate Add-ons erforderlich sind.
Mit der Offline-Programmierung musst du Roboter nicht einzeln vor Ort programmieren. Stattdessen kannst du mehrere Roboter gleichzeitig in einer virtuellen Umgebung programmieren, synchronisieren und validieren. So lässt sich vor der Umsetzung prüfen, ob alle Positionen erreichbar sind, Kollisionen auftreten und die Bewegungen der Roboter korrekt aufeinander abgestimmt sind – selbst bei Schweißnähten, die auf dem Shopfloor nur schwer einsehbar oder zugänglich sind. Dadurch werden Probleme bereits in der Simulation statt erst bei der Inbetriebnahme gelöst, was die Programmierzeit um bis zu 80 % reduzieren kann.
Visual Components verwendet für die Zykluszeitabschätzung eine generische Robotersteuerung. Das liefert nützliche Planungsdaten, erreicht aber nicht die Präzision des virtuellen ABB-Controllers. Für die meisten Schweißanwendungen ist das ausreichend. Bei Anwendungen, bei denen es auf Millisekunden ankommt, etwa im Handling oder beim Punktschweißen, kannst du Robot-Connectivity-Plug-ins nutzen, um Programme über den virtuellen Controller in RobotStudio präzise zu validieren.

Zum Weiterlesen

Schnelle und einfache Roboter-Offline-Programmierung (OLP) für das Schweißen: ein praxisnaher No-Code-Workflow
Roboter-Offline-Programmierung (OLP) macht das robotergestützte Schweißen schneller, planbarer und einfacher zu handhaben, insbesondere in High-Mix-/Low-Volume-Umgebungen. Dieser Leitfaden beschreibt den grundlegenden OLP-Workflow: von der digitalen Zellenkonfiguration über Werkzeuge und Koordinatensysteme bis...
Wie Offline-Programmierung die Effizienz beim robotergestützten Schweißen steigert
OLP-Software macht das Roboterschweißen effizienter, indem sie es Herstellern ermöglicht, Roboterprogramme direkt in einer digitalen Umgebung zu erstellen und zu optimieren. Sie unterstützt eine Vielzahl von Prozessen, darunter Lichtbogenschweißen, Laserschweißen,...
Wie MBE die Automatisierung der Roboterprogrammierung verändert
Erkunden Sie, wie Model-Based Engineering (MBE) die nächste Stufe der Automatisierung in der Offline-Programmierung von Robotern ermöglicht – durch die Verbindung von Konstruktion und Fertigung mittels modellbasierter Definition (MBD). Validierte...