Automatisierte Roboterprogrammierung: Roboterbahnen in wenigen Minuten automatisch erstellen
Die automatisierte Roboterprogrammierung reduziert den manuellen Aufwand erheblich, indem sie Pfaderstellung und -validierung in die Roboter-Offline-Programmierung (OLP) verlagert. Dieser Artikel zeigt, wie automatisierte Programmierung in der Praxis funktioniert, welche Rolle der automatische Path Solver dabei spielt und wie verschiedene Automatisierungsstufen in OLP Herstellern helfen, schneller zu skalieren und Engpässe in der Programmierung zu reduzieren.
Die Programmierung von Industrierobotern war lange langsam, repetitiv und eng an die Werkshalle gebunden. Ingenieure bewegten Roboter Punkt für Punkt mit dem Teachpendant, und bei jeder Konstruktionsänderung musste die Programmierung von vorne beginnen. Selbst der Umstieg auf die klassische Roboter-Offline-Programmierung (OLP) hilft, weil die Arbeit aus der Werkshalle verlagert wird. Bei komplexen Bauteilen mit Hunderten von Schweißnähten ist es aber immer noch zeitaufwendig, jede einzelne Bahn manuell durchzuklicken.
Die automatisierte Roboterprogrammierung geht noch einen Schritt weiter: Sie erstellt und validiert Roboterbahnen mit minimalem manuellem Aufwand. So können Hersteller auch komplexere Anforderungen bewältigen, ihre Produktion schneller skalieren und Engpässe in der Programmierung reduzieren.
Was ist automatisierte Roboterprogrammierung?
Die automatisierte Roboterprogrammierung erstellt und validiert Roboterbahnen mithilfe von Software statt durch manuelle Programmierung mit dem Teachpendant. Anstatt jede einzelne Bahn manuell durchzuklicken, automatisiert sie einen großen Teil der Arbeit und ermöglicht gleichzeitig weiterhin menschliche Kontrolle. Die OLP-Software von Visual Components unterstützt alle Stufen der OLP-Automatisierung:
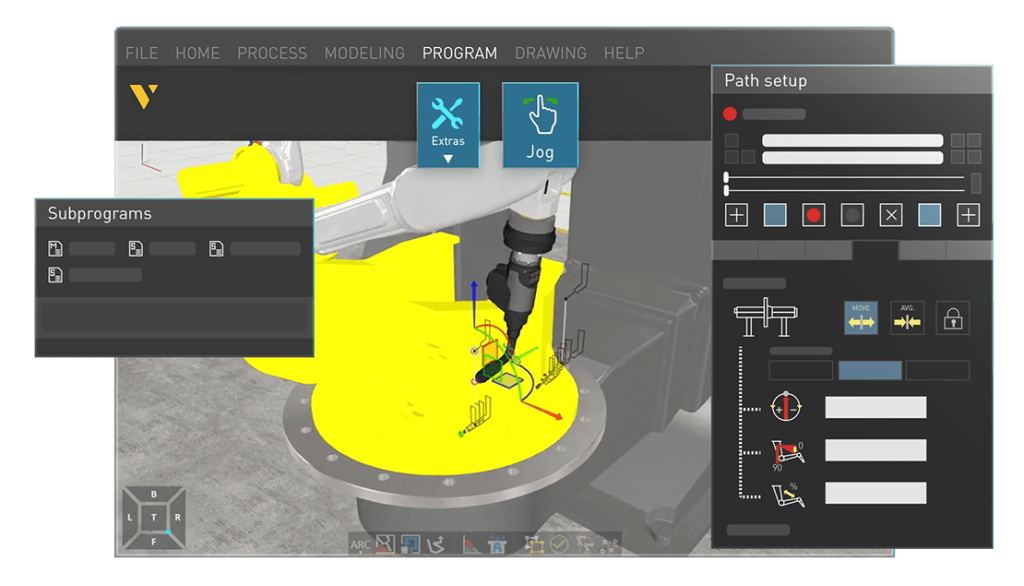
One-Click-Programmierung ermöglicht eine schnelle Erstellung von Roboterbahnen mit minimalem Aufwand: Wähle Flächen und Kanten aus, um Roboterbahnen direkt aus einem einfachen 3D-Modell zu erzeugen. Sie ist der Einstieg in die automatisierte Programmierung und eignet sich gut für den Start oder für Einzelteile.
Feature-based Programming nutzt wiederverwendbare Programmvorlagen für wiederkehrende Merkmale in verschiedenen Teilefamilien. Wenn deine Welding Procedure Specifications (WPS) in der OLP-Software digitalisiert sind, arbeitet jeder Bediener mit denselben validierten Parametern, statt Papierordner zu durchsuchen oder sich auf Erfahrungswissen zu verlassen.
Model-based Engineering geht noch einen Schritt weiter. PMI-Daten fließen mit minimalem manuellem Aufwand aus dem CAD-Modell direkt in die Roboterprogramme ein.
Man kann sich das wie eine Entwicklungskurve vorstellen: Gehen steht für die Programmierung mit dem Teachpendant, Laufen für die One-Click-Programmierung und Fliegen für vollautomatisches Model-based Engineering, bei dem der Solver die Bahnen automatisch validiert.
Über alle Automatisierungsstufen hinweg übernimmt der automatische Path Solver die komplexe Aufgabe, Roboterbahnen zu validieren und zu korrigieren, damit Kollisionen vermieden, Gelenkgrenzen eingehalten und Erreichbarkeitsgrenzen berücksichtigt werden – unabhängig davon, ob die Bahnen interaktiv erstellt oder aus dem CAD importiert werden.
Zwei Phasen der automatisierten Roboterprogrammierung
Jede Stufe der automatisierten Roboterprogrammierung in OLP umfasst zwei Phasen.
Die Pfaderstellung legt fest, wohin sich der Roboter bewegen soll. Die Roboterbahnen werden aus dem 3D-Modell erzeugt, aber der Automatisierungsgrad hängt davon ab, wie viele Fertigungsinformationen verfügbar sind und wie sie genutzt werden.
Auf der ersten Automatisierungsstufe können Nutzer mit der One-Click-Programmierung Bahnen erstellen, indem sie Flächen und Kanten direkt im Modell auswählen. Das ist schnell und bereits ein deutlicher Fortschritt gegenüber der Programmierung mit dem Teachpendant, die Bahnen werden aber weiterhin vom Nutzer im Modell festgelegt.
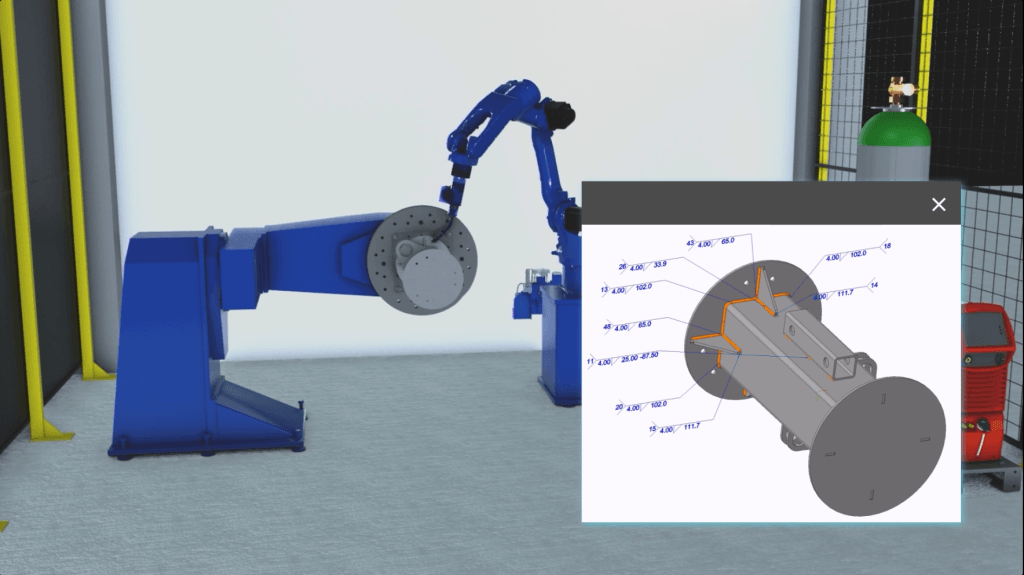
Feature-based Programming geht noch einen Schritt weiter: Die Software erkennt Bauteilmerkmale wie Schweißnähte oder Bohrungen und nutzt vordefinierte Fertigungsregeln, um Bahnen automatisch zu erzeugen.
Auf der höchsten Stufe nutzt Model-based Engineering Produktfertigungsinformationen (PMI), etwa Schweißnahtpositionen oder Schnittgeometrien, die im CAD-Modell hinterlegt sind, um mit minimalem oder ganz ohne manuellen Aufwand automatisch Bahnen für das gesamte Werkstück zu erstellen.
Die Pfadvalidierung bestimmt, ob diese Bewegungen physisch möglich und prozesskonform sind. Hier kommt der automatische Path Solver ins Spiel. Er prüft jede erzeugte Bahn auf Kollisionen, Verstöße gegen Gelenkgrenzen, Singularitäten und Erreichbarkeitsprobleme und behebt anschließend die erkannten Probleme.
Zusammen nehmen diese beiden Phasen den Großteil der interaktiven Roboterprogrammierung ab. Zwar basieren alle drei Stufen auf demselben Path Solver, doch die höchste Stufe bietet die größten Zeiteinsparungen, besonders bei komplexen Bauteilen mit Hunderten von Nähten oder Bearbeitungsschritten.
So funktioniert der automatische Path Solver in OLP
Der automatische Path Solver stellt sicher, dass Roboterbahnen nicht nur kollisionsfrei, sondern auch fertigungsgerecht sind. Er nutzt die integrierte Kollisionserkennung von Visual Components OLP, um Konflikte zwischen Roboterarm, Werkzeug, Werkstück und Vorrichtungen zu erkennen. Wird eine Kollision festgestellt, sucht der Solver nach einer alternativen Gelenkkonfiguration des Roboters oder einer anderen Werkzeugausrichtung, um das Hindernis zu umgehen, und glättet anschließend die Bewegung für einen stabilen und gleichmäßigen Bewegungsablauf.
Prozessanforderungen lösen, nicht nur Geometrieprobleme
Das Besondere an diesem Solver ist, dass er auch Prozessanforderungen berücksichtigt:
- Beispiel Schweißen: Die Arbeitswinkel des Brenners müssen innerhalb bestimmter Bereiche bleiben, damit eine ausreichende Einbrandtiefe erreicht wird. Baustahl ist hier vergleichsweise tolerant, bei Aluminium, Edelstahl und beim Laserschweißen sind die Vorgaben enger.
- Prozessspezifische Voreinstellungen: Jede Voreinstellung definiert drei Bereiche – optimal, zulässig und maximal –, an denen sich der Solver orientiert. Für MIG/MAG, TIG oder Schneidwerkzeuge können mehrere Voreinstellungen hinterlegt und automatisch gewechselt werden.
Diese umfassende Prozesskenntnis basiert auf jahrelanger Zusammenarbeit mit Partnern wie Fronius (Schweißstromquellen) und der Technischen Universität Lappeenranta (Schweißforschung). Im Gegensatz zu vielen anderen Solvern berücksichtigt er dabei weiterhin auch Qualitätsanforderungen, sodass das Beheben einer Kollision nicht zu neuen Problemen im Prozess führt.
Lösungsdurchläufe und neue Versuche
Der Solver arbeitet mit einem zweistufigen Ansatz:
- Schneller Durchlauf: Behebt rund 70 % der Kollisionen mit vereinfachten Einstellungen.
- Erweiterter Durchlauf: Nutzt ein breiteres Sampling für komplexere Kollisionen.
Wenn keiner der beiden Durchläufe eine Lösung findet, liegt die Ursache meist an Werkzeug, Vorrichtung oder Bauteildesign – nicht an der Software. Da der Solver mit randomisiertem Sampling arbeitet, kann ein erneuter Durchlauf außerdem Bahnen finden, die beim ersten Versuch noch nicht erkannt wurden.
So arbeitet der Solver beim Schweißen, Schneiden und Lackieren
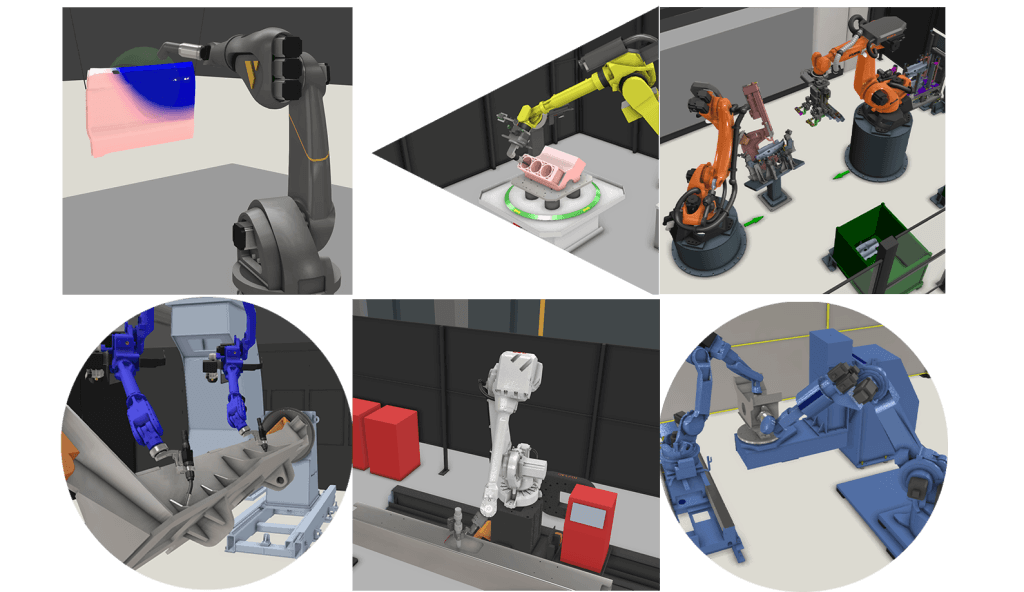
Der automatische Path Solver ist für verschiedene industrielle Prozesse optimiert:
Beim Schweißen berücksichtigt der Solver Arbeitswinkel des Brenners, Schlepp- und Stechwinkel, Pendelrichtung sowie materialspezifische Toleranzen. Auch die Abfolge mehrlagiger Schweißprozesse wird automatisiert: Definiere die Wurzellage, und die OLP-Software ergänzt Fülllagen anhand vordefinierter Vorlagen und optimiert die Reihenfolge, um den Wärmeeintrag möglichst gleichmäßig zu verteilen.
Beim Schneiden sorgt der Solver dafür, dass die Winkel des Schneidwerkzeugs entlang komplexer 3D-Geometrien innerhalb der vorgegebenen Grenzen bleiben, da die Anstellwinkel über die gesamte Bahn hinweg eingehalten werden müssen.
Beim Lackieren treten seltener Kollisionen auf, weil Spritzpistolen mit größerem Abstand zur Oberfläche arbeiten und Lackierroboter meist über mehr Bewegungsfreiheit verfügen. Der Solver behebt zwar auch hier Singularitäten und Erreichbarkeitsprobleme, der größere Mehrwert liegt jedoch in einer gleichbleibenden senkrechten Ausrichtung und einer gleichmäßigen Abdeckung.
Der Solver übernimmt auch Luftfahrten, also die Übergänge zwischen einzelnen Prozessbahnen. Er stellt sicher, dass diese Bewegungen kollisionsfrei ablaufen, optimiert sie jedoch nicht hinsichtlich des kürzesten Wegs oder der schnellsten Zykluszeit. Für hochvolumige Automobillinien, bei denen eine halbe Sekunde über Hunderte von Robotern hinweg einen Unterschied macht, lassen sich Drittanbietertools wie Realtime Robotics für diese Art der Optimierung in die Visual-Components-Umgebung integrieren.
Wenn der Solver keine Bahn finden kann

Der Solver findet nicht immer eine Lösung, und genau das kann eine wertvolle Erkenntnis sein.
Versuch es zuerst noch einmal. Der Solver arbeitet mit randomisiertem Sampling, daher kann ein erneuter Durchlauf eine Bahn finden, die beim ersten Versuch nicht gefunden wurde. Wenn das nicht hilft, verlängere die Lösungszeit und gib dem Algorithmus mehr Spielraum.
Dann solltest du dir den physischen Aufbau ansehen. Eine Werkzeugkollision in einem tiefen Hohlraum lässt sich möglicherweise mit einem längeren Brenner vermeiden, der den Roboterarm weiter vom Werkstück fernhält. Falsch positionierte Spannvorrichtungen gehören in realen Anwendungen zu den häufigsten Ursachen für unlösbare Bahnen. Automatisierte Spannvorrichtungen, die sich während bestimmter Programmschritte per I/O-Signal zurückziehen, können hier helfen.
Wenn nichts davon funktioniert, hast du trotzdem etwas gewonnen: die Sicherheit, mit belastbaren Argumenten zum Konstruktionsteam zurückzugehen. Mit den Daten des Solvers kannst du zeigen, dass sich dieses Bauteil in seiner aktuellen Form nicht fertigen lässt. Diese Rückkopplungsschleife verhindert teure Überraschungen in der Werkshalle. In der Praxis sparen solche Abstimmungen oft mehr Geld als die reine Zeitersparnis durch die Roboter-Offline-Programmierung.
Wie sich die Zeitersparnis durch automatisierte Programmierung in der Praxis zeigt
Um die Zeitersparnis zu messen, vergleichen wir den Zeitaufwand für die Erstellung und Validierung produktionsreifer Roboterprogramme – nicht für das Einrichten der Software oder die Erstellung eines digitalen Zwillings.
Als grober Vergleich gilt: Model-based Programming dauert Minuten, One-Click-OLP Stunden und die Programmierung mit dem Teachpendant Tage oder Wochen. Neue Nutzer gewinnen oft schon innerhalb einer Woche Vertrauen in den Solver: Aus anfänglicher Skepsis wird Überraschung, wenn eine Bahn, die früher 30 Minuten gedauert hat, in zwei Sekunden gelöst wird – und damit der Wunsch nach noch mehr Automatisierung wächst.
Diese Verbesserungen zeigen sich auch in realen Produktionsumgebungen:
Ponsse (Forstmaschinen): Bei einem großen Rahmenbauteil ließ sich der Programmieraufwand mit One-Click- und feature-basierten Methoden von 10 Tagen auf 1 Tag reduzieren. Die Programme lassen sich über verschiedene Varianten hinweg wiederverwenden, wodurch jedes neue Modell schneller umgesetzt werden kann. Noch größere Zeiteinsparungen sind möglich, wenn Model-based Engineering eingeführt wird.
Duun Industrier in Norwegen programmierte eine komplette robotergestützte Schweißzelle vor, noch bevor der Roboter überhaupt installiert war. So konnte die Produktion vom ersten Tag an starten und so von Beginn an zu höherer Effizienz und einem besseren ROI beitragen.
Sandvik: Verdoppelte die robotergestützte Schweißkapazität, indem OLP zur Skalierung von Programmen eingesetzt wurde. Durch Modularisierung können kleinere Projekte mit ähnlichen Bauteilen bestehende Programme wiederverwenden und nur die geänderten Details anpassen, was den Produktionsanlauf für neue, aber ähnliche Produkte beschleunigt.
Die richtige Stufe der automatisierten Programmierung wählen

Welche Stufe der automatisierten Programmierung die richtige ist, hängt von deiner Produktionsumgebung ab.
Wenn du eine kleine Werkstatt mit nur wenigen Schweißnähten pro Bauteil hast, ist One-Click-Programmierung wahrscheinlich schneller als die vollständige Model-based-Engineering-Pipeline aufzusetzen. Das gilt auch für Prototyping und Forschung & Entwicklung, wo Flexibilität wichtiger ist als Geschwindigkeit.
Komplexe Mehrroboterzellen mit großen Werkstücken, die umgespannt werden müssen und mehrere Schweißpositionen erfordern, erfordern bei der Bahnplanung weiterhin Entscheidungen durch den Menschen. Auch bei häufigen Konstruktionsänderungen ist ein Validierungsschritt nötig, bevor jede Änderung den Roboter erreicht. Solange eine vollständige PLM-Integration diese Lücke noch nicht schließt, muss eine Person die Ergebnisse prüfen.
Auch in diesen Fällen beschleunigt der automatische Path Solver die Arbeit. Du programmierst interaktiv auf One-Click-Niveau und überlässt dem Solver die Kollisionslösung und Glättung der Bahnen.
Wohin sich die automatisierte Programmierung entwickelt
Automatisierte Programmierung verringert grundlegend die Abhängigkeit von knapper Expertise in der Roboterprogrammierung. Statt dass ein erfahrener Roboterprogrammierer Stunden in jedes einzelne Bauteil investiert, übernimmt die OLP-Software den Großteil der Arbeit, während ein Programmierer das Ergebnis prüft. Für Hersteller, die mit Fachkräftemangel zu kämpfen haben, ist das ein entscheidender Vorteil.
Je mehr PMI-Daten durch Model-based Engineering in CAD-Modelle einfließen, desto kleiner wird der interaktive Anteil im Programmierprozess. Von einer vollständig autonomen Programmierung sind wir zwar noch entfernt, doch der Weg von „CAD-Datei liegt vor“ zu „der Roboter läuft“ wird von Jahr zu Jahr kürzer.
Erlebe es in der Praxis: Buche eine Demo und erfahre, wie sich automatisierte Roboterprogrammierung in deiner Produktionsumgebung einsetzen lässt.
Häufig gestellte Fragen
Die automatisierte Programmierung in OLP umfasst drei Automatisierungsstufen. Mit der One-Click-Programmierung kannst du Roboterbahnen erzeugen, indem du Flächen und Kanten in einem 3D-Modell auswählst. Feature-based Programming nutzt wiederverwendbare Vorlagen für wiederkehrende Bauteilmerkmale. Model-based Engineering importiert Produktfertigungsinformationen (PMI) direkt aus CAD-Modellen, um Programme mit minimalem manuellem Aufwand zu erstellen. Über alle drei Stufen hinweg validiert der Path Solver Programme hinsichtlich Kollisionen, Gelenkgrenzen und Erreichbarkeit. Weitere Details zu den einzelnen Stufen findest du im Blogbeitrag zu den OLP-Automatisierungsstufen.
Der Solver behebt Kollisionen und Singularitäten innerhalb einzelner Roboterprogramme, auch in Konfigurationen mit externen Achsen. Die Koordination von Mehrroboterzellen mit großen Werkstücken und Umspannvorgängen erfordert auf Planungsebene jedoch weiterhin interaktive Entscheidungen durch den Menschen. Auch in solchen Fällen beschleunigt der Solver die Arbeit, indem er die Kollisionslösung automatisch übernimmt.
Visual Components OLP ist herstellerunabhängig und unterstützt alle gängigen Industrierobotermarken über Postprozessoren und eine Roboterbibliothek. Du kannst Roboter verschiedener Hersteller in derselben Plattform programmieren.
Versuche es zuerst erneut, da der Solver mit randomisiertem Sampling arbeitet und beim nächsten Durchlauf möglicherweise eine andere Lösung findet. Wenn das nicht hilft, verlängere die Lösungszeit und prüfe dann Werkzeugauslegung (z. B. eine andere Brennerlänge ausprobieren), Vorrichtungen (Spannvorrichtungen neu positionieren) oder gib das Problem an das Konstruktionsteam weiter.
Ja. Der Solver nutzt prozessspezifische Voreinstellungen mit unterschiedlichen Wertebereichen für jeden Prozess. Am umfassendsten unterstützt wird das Schweißen, etwa bei Brennerwinkeln, Materialtoleranzen und der Abfolge mehrlagiger Schweißprozesse, gefolgt von Schneiden und Lackieren.
Er nutzt die integrierte Kollisionserkennung, um Konflikte zwischen Roboter, Werkzeug, Werkstück und Vorrichtungen zu erkennen, und berechnet anschließend alternative Konfigurationen, die Hindernisse vermeiden und dabei prozessspezifische Vorgaben wie Brennerwinkel einhalten. Anschließend werden die Bahnen geglättet, damit der Roboter Hindernisse ohne ruckartige Bewegungen umfährt.
Als grober Richtwert gilt: Modellbasierte automatisierte Programmierung dauert Minuten, One-Click-OLP Stunden und die Programmierung mit dem Teachpendant Tage. Ponsse konnte den Programmieraufwand für große Rahmenbauteile durch One-Click- und feature-basierte Programmierung von 10 Tagen auf 1 Tag reduzieren. Die Zeitersparnis steigt weiter, wenn Programme über verschiedene Bauteilvarianten hinweg wiederverwendet werden.
