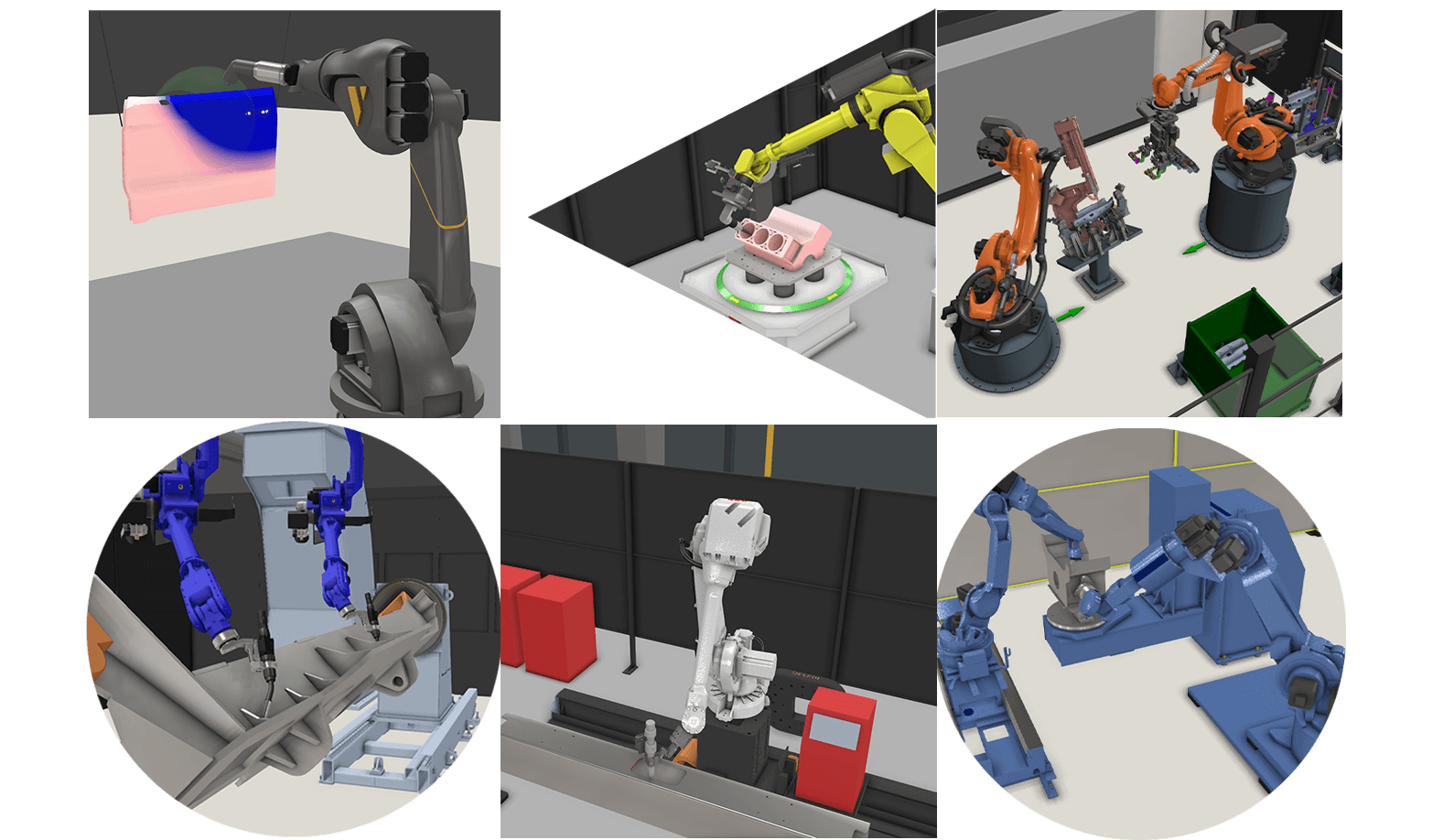
Visual Components OLPソフトウェアによる製造プロセス向けロボットティーチング
ロボットティーチングはオフライン化によって大きく進化しました。仮想空間で動作を最適化できるため、生産を止めることなく、ダウンタイムの削減や精度向上、溶接・塗装・加工・組立といった工程を、よりスムーズに進められるようになります。また、現場作業者がティーチングスキルを身につけることで、自動化の効果を最大限に引き出し、安定した生産体制の構築にもつながります。
産業用ロボットは製造現場に欠かせない存在ですが、手動でのティーチングには時間がかかり、精度や再現性のばらつきに加え、生産中断のリスクも伴います。特に、溶接や塗装、加工、組立など、精密さと効率が求められる工程では、こうした課題が顕在化しやすくなります。ロボットオフラインティーチング(OLP)を導入すれば、これらの問題を一挙に解決できます。
OLPでは、ティーチペンダントで動作をひとつずつティーチングするのではなく、仮想空間上であらかじめロボットプログラムを作成し、現場に導入する前に検証することができます。これにより、ティーチングにかかる時間を大幅に短縮でき、生産ラインへの影響も最小限に抑えられます。ここからは、なぜ手動ティーチングが各工程で課題となるのか、またOLPがそれをどのように解決できるのかについて詳しくご紹介します。
溶接におけるロボットティーチング:精度と効率の両立
溶接工程では、トーチが届くかどうか、適切な角度を保てるか、パスが正確かどうかといった点が大きな課題です。ロボットオフラインティーチング(OLP)を使えば、これらを安定して制御でき、複雑な溶接にも対応可能です。精密な位置指定が求められる溶接では、手動でのティーチングには時間がかかり、ばらつきも生じやすくなります。特に、3次元的な軌道に沿って、トーチの角度や距離を正確に保ちながら動作させるのは困難です。わずかな誤差でも再加工や品質不良を招き、ティーチングが完了するまでロボットセルを停止せざるを得ないなど、生産に大きな影響を与えることがあります。
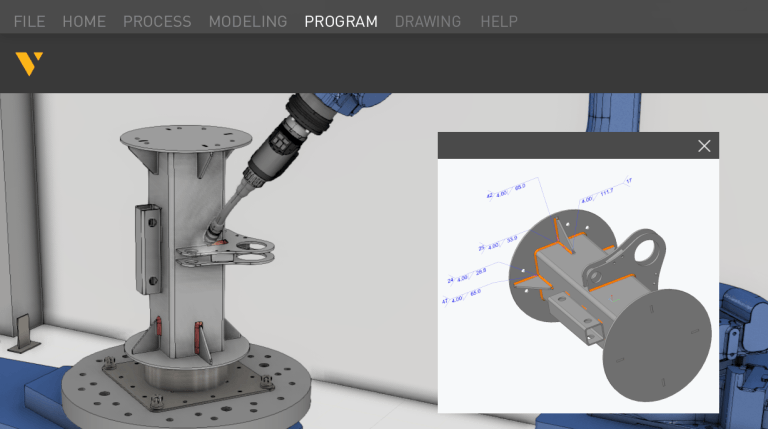
OLPでは、ロボットセルのCADモデルを使用します。仮想空間でプログラムを作成することで、トーチのパスを正確に定義し、動きのシミュレーションや衝突のリスクを事前にチェックできます。
さらに、Visual ComponentsのOLPソフトウェアは、モデルベース定義(MBD)から溶接情報を直接取り込むことができ、溶接作業の各パスを手作業で個別に作成する必要がありません。溶接に必要なパラメーターが自動で反映されるため、配置精度と作業の一貫性が保たれます。この自動化により、ティーチングにかかる時間が大幅に短縮され、エラーの発生を最小限に抑えます。その結果、生産性の向上につながります。
プログラムの検証が終われば、そのままロボットに転送してすぐに生産を再開できるため、待機によるロスを防ぎ、高品質な溶接が安定して行えます。
塗装におけるロボットティーチング:ムラなく、無駄なく
溶接と同様に、塗装やコーティングといったスプレー工程でも、ノズルの向きは非常に重要です。均一に塗布するためには、スピード、角度、吹き付け距離といった条件を精密に制御する必要があります。しかし、手動ロボットティーチングではこれらの調整が難しく、塗料の飛び散りや塗りムラ、材料の無駄が発生しやすくなります。スプレーパスを手作業で微調整するのは時間がかかり、その都度ラインを止めなければなりません。さらに、生産ライン上でスプレーパターンを直接試すと、材料の浪費に加えてサイクルタイムも長くなり、コスト増加の原因にもなります。
ロボットオフラインティーチングを活用すれば、仮想環境で最適なスプレーパスを事前に設計・シミュレーションでき、実際の塗装時にムラなく塗布できるだけでなく、塗料の飛び散りや材料ロスを防げます。スプレー動作をオフラインでシミュレーションしておけば、セットアップの時間を短縮できるうえ、生産を止めずに、安定した品質とコスト抑制の両方を実現できます。
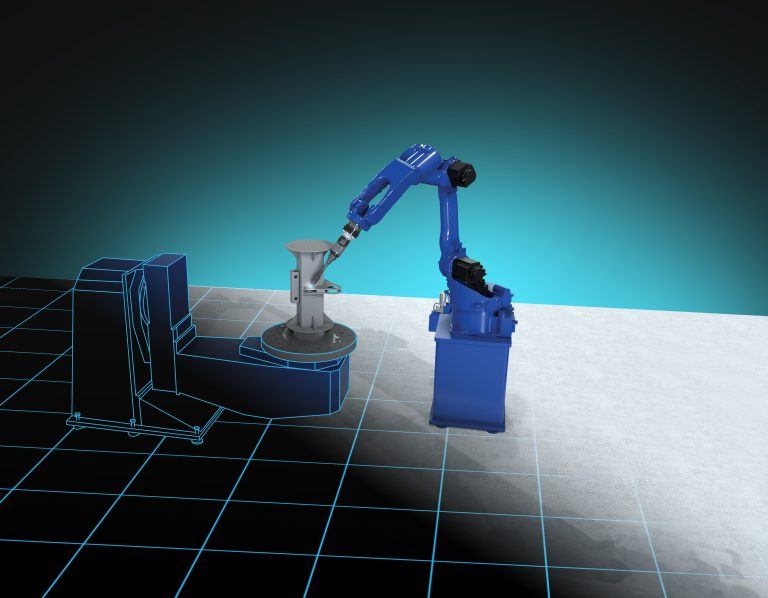
加工におけるロボットティーチング:複雑な動きを正確に再現
ショットブラストやバリ取りといった処理を含む加工工程では、複雑で高精度な加工パスが求められます。圧力や速度、位置がわずかにずれるだけで不良の原因となるため、こうしたパスを手動でティーチングするには時間がかかり、複数の部品に一貫して再現するのも困難です。また、パスの調整にはその都度生産を止める必要があり、ダウンタイムの増加やスループットの低下を招きます。
ロボットオフラインティーチングを活用すれば、CADデータに基づき加工パスを正確に作成・最適化できます。ツールの角度や圧力、動作を細かく調整できるため、部品ごとに高い加工精度を安定して再現できます。あらかじめ仮想空間でプログラムを仕上げておくことで、生産ラインを止めずに準備が進められ、材料ロスやセットアップ時間の削減にもつながります。その結果、スループットが向上し、運用コストも抑えられます。
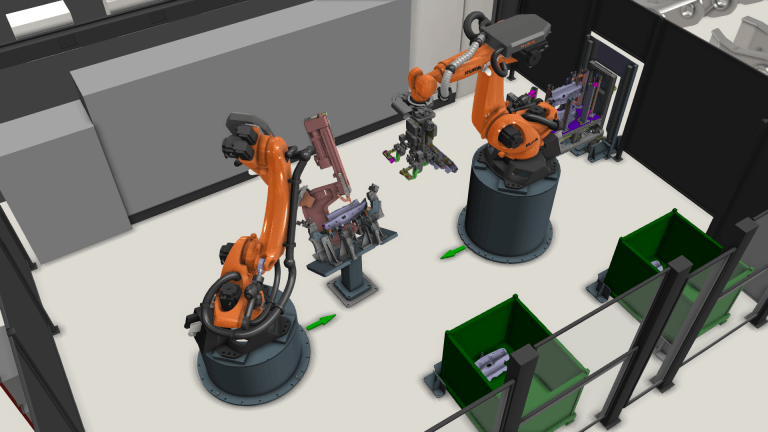
組立におけるロボットティーチング:正確な配置と連携で生産性アップ
ロボットによる組立工程では、複雑な動作の同期や部品の正確な配置、他の自動化システムとの連携が求められます。これらを手動でティーチングしようとすると、細かい調整に手間がかかり、セットアップにも時間を要するため、生産スピードが落ちてしまいます。わずかな位置ズレでも不良の原因となり、ライン全体の効率も低下します。
OLPを使えば、組立シーケンスを仮想空間で定義・シミュレーションでき、従来のように試行錯誤しながら手動でティーチングする必要がなくなります。これにより、部品を正確に配置できるだけでなく、工程全体の流れがスムーズになり、製品バリエーションの切り替えも素早く行えます。また、把持や挿入といった作業においても、グリッパーの向きを細かく制御できるため、安定して同じ動作を繰り返すことが可能です。
加えて、重力補正テーブル、レーザーセンサー、カメラなどの技術を使って、プログラム実行中にCAD上の理想位置と実物のズレを検出し、自動で補正できます。これにより、位置精度が保たれ、不良の発生を抑えながら、組立ライン全体の生産性を高めることができます。
なぜ今、ロボットティーチングスキルを持つ人材が求められているのか
ロボットの導入が各業界で急速に進む中、熟練したロボットエンジニアの人材不足が深刻化しています。このスキルギャップを埋めて自動化を円滑に展開し、投資に見合った成果を引き出すには、作業者やエンジニア自身のスキルアップが欠かせません。特にロボットオフラインティーチングの知識を持つことで、現場チームはロボットを自信を持って運用・最適化し、生産性向上とダウンタイム抑制を両立できるようになります。
Visual ComponentsのOLPソフトウェアは、シミュレーションを活用した学習環境を提供します。これにより、ユーザーは実際の生産を止めることなく、ロボットティーチングスキルを習得し、動作のテスト・改善、潜在的な問題のトラブルシューティングを行うことができます。この実践的なアプローチによって、複数ロボットの協調動作の習得、複雑な工程の最適化、そして継続的なプロセス改善が可能になります。人材育成に取り組むことで、外部リソースへの依存を減らせるだけでなく、今後の自動化課題にも社内で柔軟に対応できる体制づくりにもつながります。
ロボットティーチングの未来:よりスマートに、より高速に、より柔軟に
産業の自動化が進む中、メーカーには、ロボットのティーチング時間を短縮しながら精度を高め、生産ラインの安定稼働を維持できるような、より高度な手法が求められています。ロボットオフラインティーチング(OLP)を活用すれば、手動ティーチングによるボトルネックを解消し、再加工やライン停止を最小限に抑えつつ、パスも効率よく見直すことができます。溶接、塗装、組立、加工といったあらゆる工程で、OLPによってロボットの動作を迅速かつ安定してティーチングできるため、生産性と長期的な運用効率の向上が期待できます。
手動ティーチングに課題を感じている方は、ロボットオフラインティーチング(OLP)が製造プロセスをどのように効率化できるか、ぜひお問い合わせください。
Further reading
モデルベースエンジニアリングで、ロボットオフラインティーチングの自動化を次のステージへ
モデルベースエンジニアリングでは、設計段階で定義された寸法や公差などの製造情報を、そのまま製造プロセスに活用できるため、設計と製造の連携がこれまで以上にスムーズになります。Capvidia社のツールを使えば、溶接情報を含む検証済みの製造データをエクスポートし、Visual ComponentsのOLPソフトウェアでそのまま利用できます。この連携により、ロボットティーチングの工程全体が自動化され、より速く、正確に進められるようになります。
Visual Components OLPソフトウェアで実現する、ロボットオフラインティーチングの自動化
Visual ComponentsのOLPソフトウェアは、製品製造情報(PMI)を活用してワークフローを効率化し、ロボットの手動ティーチングを不要にします。ワンクリックでのティーチングから、モデルベース定義(MBD)による完全自動化まで対応可能で、エラーの削減や生産スピードの向上を実現します。これにより、設計から製造までの連携もスムーズに行えます。
多品目小ロット生産ラインの効率を高めるロボットオフラインティーチング
段取り替えが頻発したり、小ロット生産が続いたりすると、生産性が下がると考えられがちですが、必ずしもそうではありません。ロボットオフラインティーチング(OLP)を活用すれば、生産を止めずに、従来の10倍の速さでティーチングが行えます。この記事では、需要の変化に柔軟に対応し、ダウンタイムを最小限に抑えつつ、競争力を維持している企業の事例をご紹介します。