ABB社製ロボットのティーチングおよびオフラインティーチングに関する完全ガイド
ここでは、オフラインティーチング(OLP)を用いた、ABB社製ロボットのティーチングを習得します。本ガイドでは、MultiMove同期溶接セルの効率的なティーチング方法や、OLPのワークフローを効率化する方法、生産ニーズに応じてABB社のRobotStudioやVisual Componentsといった適切なソフトウェアを選定する方法を解説します。
ABB社製ロボットは、高速溶接から精密組立まで、世界でも特に要求水準の高い製造工程で稼働しています。しかしその裏で、ティーチングは長年にわたりボトルネックとなってきました。
RAPIDプログラミング言語、IRBシリーズのラインナップ、そして1つのコントローラーで複数のロボットを制御するMultiMoveにより、非常に優れた環境を構築できます。しかし、従来のように現場でティーチングする場合、ロボットや生産時間が拘束され、数週間が無駄になってしまうことも少なくありません。
この問題を解決するのが、OLP(オフラインティーチング)です。仮想空間でロボットプログラムを作成・検証し、そのまま実機へ適用できます。次の作業をティーチングしている間も、生産を中断する必要はありません。
本ガイドでは、ABB社製ロボットの基礎、OLPのワークフロー、MultiMove同期溶接、そして適切なティーチングツールの選び方を解説します。
OLPにおいて重要となる、ABB社製ロボットのモデルとコントローラー
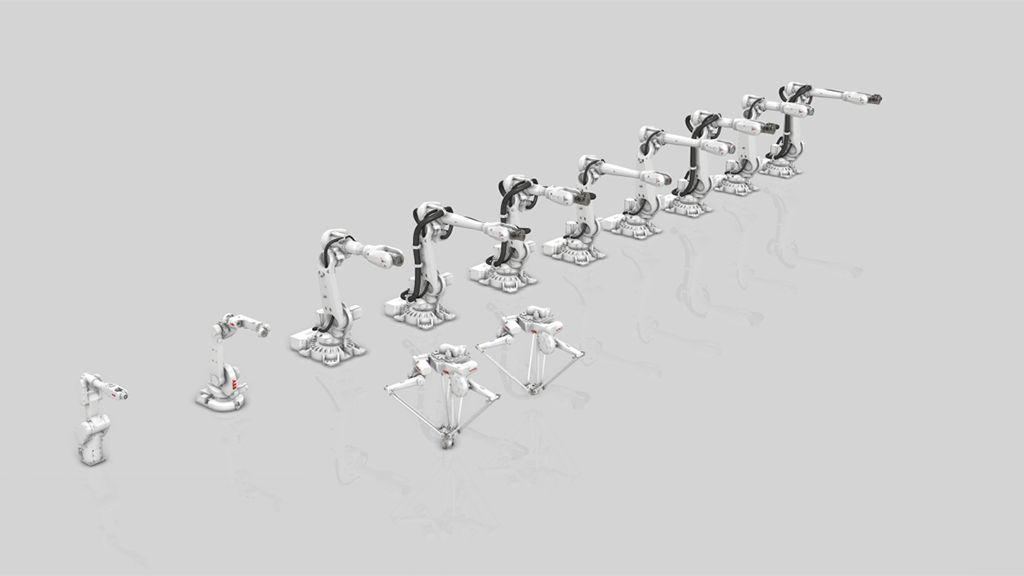
ABB社のIRBシリーズでは、可搬重量3kg~800kgまでの数十種類のモデルが展開されています。特にOmniCoreおよびIRC5コントローラーは、世界中で500以上のロボットの導入に使用されています。
ABB社のIRBシリーズのラインナップは幅広いものとなっています。IRB 1600やIRB 2600は、ほとんどのアーク溶接や資材運搬に対応可能です。IRB 6700は、より過酷な環境で、さらなる重量に対応できるように設計されています。軸構成や可動範囲、可搬重量はモデルによって異なり、こうした要素はすべてオフラインティーチング環境の構築において重要となります。
ロボットと同様に重要なのが、コントローラーです。最新世代であるABB社のOmniCoreは、高速処理、優れた動作制御、幅広い接続性を備えています。また、IRC5も引き続き既存の設備で広く使用されています。OLPツールの選定にあたっては、使用するコントローラーに対応したものを選ぶ必要があります。対応していないものを選ぶと、仮想空間でティーチングした内容が現場の動作と一致しなくなってしまいます。
ABB社製ロボットのティーチングは、ABB社の独自言語であるRAPIDで行います。オンラインでもオフラインでも、コントローラーが実行可能な正しいRAPIDコードで出力する必要があります。OLPソフトウェア選定においては、この点が最も重要なポイントとなります。
オフラインティーチングの概要、ABB社製ロボットに有効である理由

オフラインティーチングにより、ティーチング時間を最大80%削減できます。ティーチング中に生産が停止することはありません。実機ではなく仮想空間で衝突を検出できます。
オフラインティーチングとは、生産を止めることなく、仮想空間でロボットプログラムを作成することを指します。現場で手動によりティーチングするのではなく、オフィスにいながらにして、プログラムの構築やシミュレーション、実機への展開を行います。
一般的なABB社のOLPワークフローは、CADモデルのインポート、仮想ロボットセルの構築、動作パスのティーチング、衝突の検出、サイクルタイムの検証、本番用コードの出力となっています。
主な効果は以下のとおりです。
- ティーチペンダントによるプログラミングと比較し、ロボットティーチングにかかる時間を最大80%削減(Visual Components顧客データより)
- 検証済みプログラムをそのままコミッショニングに使用でき、現地でのトラブル対応を回避
- 衝突、特異点、パスエラーを現場で構築する前に検出可能
- 生産を継続しながら次のジョブをティーチング可能
引き渡し前にロボットセル全体をデジタルで検証する必要がある場合、OLPが最適です。
ABB社のMultiMoveと同期溶接

ABB社のMultiMoveは、1つのコントローラーで複数のロボットを完全に同期制御する仕組みです。同期溶接に用いられる場合が多く、1台のロボットが溶接を行い、もう1台がワークの保持や再配置を行います。また、複数のロボットによる組み立てや資材運搬にも活用できます。
MultiMoveセルのティーチング手順は次のとおりです。
- ロボットセルおよびワークの形状の定義
- 各ロボットの協調動作パスのティーチング
- ロボット間のタイミングおよび動作制約の同期
- 衝突が生じない動作のシミュレーションおよび検証
- 実機セルへの展開
この手順は一見簡単に見えますが、実際はより複雑です。衝突を回避しながらロボット間のタイミングを調整するには、高い精度が求められます。また、作業空間が狭い場合、クリアランスの検証が難しくなります。さらに、シミュレーション環境なしで動作タイミングのずれや干渉といった問題をデバッグする場合、現場での試行錯誤にコストがかかってしまいます。
こうした課題には、次のような対応が有効です。
- 展開前にシミュレーションを行います。MultiMoveのプログラムは複雑であるため、実機のみでデバッグするのは困難です。
- 早い段階で衝突を検出します。これにより、動作パスを改善する前に仮想空間でクリアランスを検証します。
- 大まかな構築から始め、後から改善します。まずはおおよその動作パスでタイミングを合わせ、その後サイクルタイムや溶接品質を最適化します。
- OLPツールの同期機能を活用します。複数のロボットを手動で同期するには時間がかかりますが、ソフトウェアにより効率化できます。
Visual ComponentsにおけるMultiMove機能サポート
Visual ComponentsのOLPは、MultiMove構成に完全に対応しています。協調動作、独立動作、イベント同期、タスク協調など、すべての機能が利用可能です。ABB社の独自ツールと比較しても、特に制約はありません。複雑なマルチロボットセルを完全にオフラインでティーチングし、同期ロジックが想定どおりに機能することを確認した上で展開できます。
OLPツールの選定:ABB社RobotStudioとVisual Components OLPの比較
どのソフトウェアを選ぶべきかは、現場のレイアウトによって異なります。
RobotStudioは、ABB社によるオフラインティーチング環境です。ABB社製コントローラーとの統合性が高く、正確なRAPIDコード生成や、ABB社固有の技術パッケージへアクセスできる点が特徴です。使用するのがABB社製のロボットのみで、かつエンジニアがRAPIDに精通している場合、専用ツールとして有力な選択肢となります。
一方で、RobotStudioには制約もあります。たとえば、溶接プログラムの作成が煩雑である点や、溶接セルを適切にティーチングするのが難しい点などです。また、プロセスごとに機能が個別パッケージとして提供されるため、溶接、塗装など用途ごとに追加購入が必要になる場合があります。さらに、複数のブランドのロボットを使用している場合、ワークフローが統一されず、ブランドごとに異なるOLPツールを使い分ける必要があります。
Visual Components OLPは、こうした課題を解決する汎用互換のOLPプラットフォームです。22種のロボットブランドと40種以上のコントローラーに対応しており、複数のブランドを使用する環境に適しています。1つのライセンスで主要なすべての産業プロセスに対応し、追加購入は不要です。ポストプロセッサーにより、ロボットプログラムを各ロボット言語に100%の精度で変換します。また、熟練のABB社プログラマーに匹敵するRAPIDコードを生成し、人為的ミスを回避します。ポストプロセッサーはPythonでカスタマイズ可能であり、独自機能にも対応できます。同一セル内でABB社製ロボットやKUKA社製ロボット、FANUC社製ロボットを同期させる場合も、1つのプラットフォームで対応可能です。
シミュレーションからロボットコントローラーへの展開ワークフロー
Visual Components OLPからABB社製コントローラーへのプログラム転送は簡単です。USBドライブによる物理的な転送や、FTPによる直接接続により、Visual Componentsからコントローラーへ直接プログラムを保存できます。このワークフローはABB社のRobotStudioと同様です。
大きな違いとして、Visual Components OLPでは、この機能をABB社に限らず、対応するすべてのロボットブランドに適用できます。どのロボットでも、1つのプラットフォームで対応可能です。
Visual Components OLPを使用するメリット
- 製造業者を問わず、すべてのロボットを1つのツールで管理
- 従来のOLPツールと比較し、ティーチングを10倍高速化
- 溶接設備を構築前に検証
- 既存セルにより新製品の製造可否を確認
- ティーチング中の生産停止期間を削減
- サイクルタイムを事前に可視化
- 設備を購入前に検証
- 複雑な動作プログラムも直感的な操作で作成可能
両者を比較した結果をまとめると、次のとおりです。
| 機能 | ABB社RobotStudio | Visual Components |
| ABB社独自のRAPID対応 | 高い統合性 | ポストプロセッサーにより対応(精度100%、カスタマイズ可能) |
| 複数ブランド対応 | ABB社製のみ | 22種のブランドと40種以上のコントローラーに対応 |
| 複数ロボット同期 | MultiMove | あらゆるブランドの組み合わせに対応 |
| ワンクリックティーチング | なし | あり |
| 溶接セルティーチング | 限定的 | 完全対応 |
| プロセス対応範囲 | 追加パッケージとして販売 | すべての主要プロセスに対応 |
使用するのがABB社のセルのみであり、ブランド間連携が不要であれば、RobotStudioが適しています。複数のブランドのセルを使用し、ブランド間の同期や迅速なプログラム作成が必要であり、すべてのロボットを1つのツールで管理したい場合は、Visual Components OLPが最適です。
サイクルタイム精度に関する制約の理解
サイクルタイムの予測には、OLPツールに固有の制約があります。Visual Componentsは汎用ロボットコントローラーを使用してサイクルタイムを予測するため、あくまで推定値となります。ロボットコントローラーにおける動作計算の基準は、ブランドごとに異なります。計画を立てる上では役立ちますが、ABB社のRobotStudioにおけるバーチャルコントローラーほどの精度はありません。
ですが多くの場合、この制約が実務上問題となることはありません。一般的に複数のロボットによる溶接では、サイクルタイムは溶接速度や冷却時間といったプロセス要因によって長時間に及ぶため、ミリ秒から秒単位の差が全体に与える影響はごくわずかにとどまるためです。溶接プログラムは、プロセス速度や冷却時間により長時間実行され、誤差は割合として小さくなります。こうした差が顕著になるのは、資材運搬やスポット溶接などの生産ライン型プロセスで、精密なタイミングが重要な場合です。
Visual Componentsでは、サイクルタイムを正確に検証する必要がある場合、ロボットコントローラー接続機能によりRobotStudioなどのブランド固有のツールと接続できます。Visual Componentsで作成したプログラムを仮想ロボットコントローラーで実行することで、ブランドごとの精度で比較が可能です。ただし、OLPワークフローでこの機能が使われることはあまりありません。内蔵されている予測機能で十分な場合が多いためです。
ABB社製ロボットのオフラインティーチングにおけるベストプラクティス

トラブルなくスムーズに展開するためのポイントをいくつかご紹介します。
精度を左右するキャリブレーション
OLPの有効性は、3Dシミュレーションモデルが実際の作業セルをどれだけ正確に再現しているかに左右されます。CADの形状だけでなく、実際のレイアウトでも、キャリブレーションが重要になります。
キャリブレーションでは、ロボット自体を使用して周囲の環境や外部軸を測定します。その測定値を基に、シミュレーション上のレイアウトにコンポーネントを配置し、ロボットのバックアップ情報と照合します。これにより、外部軸位置を正確に定義したレイアウトモデルが構築されます。その結果、ロボットプログラムとMultiMove同期プログラムにより、生産設備の展開に必要な精度が達成されます。
Visual Componentsには、ロボットセルの自己コミッショニングに使用できるOLPキャリブレーションツールの拡張機能が含まれています。OLPやコミッショニングの経験がない場合には、専門家によるキャリブレーションサポートも受けることもでき、初めから正確な設定が可能です。これにより、キャリブレーションのワークフローを適切に確立でき、その後のプロジェクトでも適用できます。セルの複雑さに応じて、初期導入とキャリブレーションには通常4~8営業日を要します。
その他のベストプラクティス
まずは大まかな動作パスでワークフロー全体を構築し、その後サイクルタイムを改善します。最初からすべてを完璧にしようとすると時間が無駄になってしまうため、段階的な改善を前提に進めます。
展開する前に、衝突の検出とサイクルタイムの分析を実施します。この工程は、問題が疑われる場合に限らず、常に実施することが推奨されます。
よくあるミス
- キャリブレーションを省略しないでください。仮想のロボットと実機の不整合につながり、後から修正することが困難になります。
- 初期プログラムを複雑にしすぎないようにしてください。まずはシンプルに構築し、検証後に最適化を行ってください。
- 技術パッケージを無視しないでください。OLPツールが、溶接、塗装、塗布など、必要なABB社の技術パッケージに対応していることを確認してください。
実際の例
ABB社のMultiMoveを使用したOLPについて、規模や用途が異なる2社の実例をご紹介します。
MSK Finland社は、Visual Components OLPを使用して、ABB社のMultiMoveやABB社製ロボットセルをティーチングし、溶接や研磨を実施しています。Jucat社製モジュール溶接セルでは、1つのコントローラーで3台のロボットを制御し、治具用ロボットが2台の溶接ロボットのワークポジショナーとして機能します。別のJucat社製フレーム溶接セルでは、ロボット2台、ワークポジショナー2台、フロアトラック1台を1つのコントローラーで制御しています。さらに別のコントローラーで、2台のABB社製ロボットによる研磨セルも運用しています。これらのセルは3つとも、実機の組み立て前にコンセプトの設計やオフラインティーチングが行われました。
Volvo Construction Equipment社は、Visual Components OLPを使用し、世界各地の工場でABB社のMultiMoveロボットを含む治具レス溶接セルのティーチングを行っています。ABB社製セルでは、ロボット3台とワークポジショナー2台が1つのコントローラーで制御されています。ティーチングは完全に同期され、重力テーブルも備わっています。世界中で同じOLPワークフローを展開することで、拠点やロボット構成を問わず標準化を実現しています。
Volvo Construction Equipment社の事例全文はこちら→
まとめ
OLPの活用により、現場でのロボットティーチングに費やしていた時間を削減できます。ダウンタイムの削減や精度の向上を実現し、MultiMove同期溶接の計画や検証を事前に行えます。
RobotStudioでもVisual Componentsでも、シミュレーションし、検証し、展開するという手法は変わりません。現場に適したツールを選択してください。
よくあるご質問
可能です。ABB社のRobotStudioとVisual Components OLPは、いずれもMultiMove構成のオフラインティーチングに対応しています。Visual Components OLPはすべてのMultiMove機能に対応しており、協調動作、独立動作、イベント同期、タスク協調を制約なく利用できます。
オフラインティーチングでは、ロボットプログラムの作成と検証を仮想空間で行います。衝突やタイミングの問題、パスのエラーを現場で構築する前に検出できるため、コミッショニングにかかる時間や生産停止期間を短縮できます。
レイアウトにより異なります。RobotStudioはABB社のセルのみを使用する場合に適しており、RAPIDとの統合性に優れています。これに対し、Visual Components OLPは、複数のブランドを使用する環境や、異なるメーカー間の同期が必要な場合に適しています。いずれもMultiMove機能に完全対応しています。
まず、CADモデルをインポートし、仮想ロボットセルを構築します。その後、動作パスをプログラムしてシミュレーションと検証を行い、プログラムを出力してUSBやFTPで実機へ展開します。
たとえば主な課題として、複数のロボット間のタイミング調整や、狭い作業空間での衝突回避、仮想プログラムと実機の動作を一致させることなどが挙げられます。シミュレーションや適切なキャリブレーションを行うことにより、こうした課題に対応可能です。
対応しています。Visual Components OLPは、ABB社向けのポストプロセッサーを内蔵しており、100%の精度でRAPIDコードを生成します。Pythonによるカスタマイズも可能で、独自機能にも対応できます。溶接、塗装、塗布といった主要プロセスを、すべて1つのライセンスで利用いただけます。
オフラインティーチングの場合、現場で個別にティーチングする必要はなく、仮想空間で同時に複数のロボットのティーチングや同期、検証を行えます。これにより、可動範囲の検証や衝突の検出、動作の調整を事前に行うことができます。現場では見えにくい箇所や、アクセスが難しい箇所の溶接にも対応可能です。その結果、コミッショニング段階ではなくシミュレーション段階で問題を解決でき、ティーチング時間を最大80%削減できます。
Visual Componentsでは、汎用ロボットコントローラーを使用してサイクルタイムを推定します。計画を立てる上では有効ですが、ABB社のバーチャルコントローラーほどの精度はありません。ただし、ほとんどの溶接用途では十分な精度となっています。ミリ秒単位の精度が必要な場合は、RobotStudioのバーチャルコントローラーで実行することで、高精度な検証が可能です。
